(潍坊市生态环境监控中心,山东 潍坊 261041)
摘要:介绍了现有交通仿真软件相对于国内路况存在的很多不足,如缺少自行车、行人的模拟等,结合原有的交通仿真模型和我国自行车/行人交通特性建立了新的混合交通流微观仿真模型,并给出了混合交通流仿真的实现思想。新的仿真系统原型以元胞自动机模型为基础,同时定义了符合国内道路状况的元胞自动机规则。最后,给出了该交通仿真系统原型的实现结果和结论。
关键词:交通仿真;微观仿真;元胞自动机;路网;节点;网格
0引言
交通仿真是计算机仿真技术在交通工程领域中的应用,它是一项复现交通流时间和空间变化的技术,目前已经成为评价智能交通系统(ITS)策略的一种重要的工具。交通仿真是再现交通流运行规律与特征,对交通系统进行管理、控制和优化的重要实验手段和工具.它可以对真实世界中尚未得到实施的技术进行细致的分析,对已实施的技术提出优化建议,在不对现有交通系统产生任何干扰的情况下,进行多种系统方案的检验,引导更有效的方案实施。交通仿真早在上个世纪50年代即被提出,经过多年的研究与实践,人们在交通网络仿真方面已取得了许多有益的研究成果。
用元胞自动机模拟交通系统的基本思想是:在整个交通网络中,每条道路被分成有限的元胞,在模拟的时间步序中每个元胞代表一辆机动车。如果一个机动车可以用元胞表示的话,通过使用简单的规则集可以把这个元胞(机动车)移到另一个元胞处,即实现了机动车的运行状态的变化,因而从整体上可以模拟出交通系统中交通流的变化特性。通过这个被模拟的交通模型,我们可以对其路况进行分析,从而对交通系统进行有效的智能控制。
1基于元胞自动机的交通仿真模型的优点
元胞自动机模型有以下4个主要的优点:
1)在元胞自动机模型中,以易操作的规则取代复杂的方程式,所以易于以电脑来探讨其呈现的特性。
2)道路被划分大量细小的格子。当车辆转弯时,简化为直线运行,这样使道路的参数被简化。
3)元胞自动机模型是空间无限离散、状态有限离散、时间离散的全离散为整数一个动力学模型。该模型则用上述简单的描述来分析复杂的系统,同时模型中主要的参数为整数,该特性与真实的交通情况相吻合。
4)元胞自动机模型通过定义局部的元胞邻近关系以及使用局部演化的规则,来描述现象的变化。类似车辆的行为也是由其周围车辆行为所决定。同时元胞自动机模型中,网络的交点占据中心地位,实际的交通系统中道口在网络中的分布也是主要方面。
2以VISSIM为主的仿真软件简介
在VISSIM模型中,信号灯控制程序可以在定时控制或者感应式信号程序方式下进行模拟。在信号控制程序的模拟时,西门子、飞利浦、PTV、BASEL等公司的产品都可以与之兼容。
VISSIM仿真系统中,对于交通流和信号控制之间有一个接口,通过这个接口可以在检测器数据和信号灯控制参数之间进行数据交换。仿真结果可以是视窗动态交通流演示,或者是最后输出多种重要交通参数的数据表格。VISSIM的交通流模型既可以模拟一条车道上的车队行驶,也可以模拟车流在车道组中的变换情况。利用这些交通特征数据可以按照交通服务水平标准确定交通运行状况,进行多种措施预期实施效果的比较。
3元胞自动机系统
元胞自动机是在均匀一致的网格上由有限状态的元胞构成的离散的动力系统。其特点是空间、时间和状态离散化。其运行规则主要有:所有元胞的状态同时发生变化;且在t+1时刻,第i个元胞的状态由时刻t的第i个元胞以及相邻的有限个元胞的状态共同决定。
这种基于元胞自动机的交通实体表示将现实中复杂的交通实体信息用简单的几何数字来描述并进行逻辑推理与运算。在获得了交通仿真信息的情况下简化了实体模型,提高了仿真计算速度,可模拟较大路网上的大流量交通问题。
4路网描述模型
路网的道路几何条件描述将影响交通仿真软件的真实性和交互性,是一项非常重要的关键技术。将实际中的路况用简单的几何信息来表达,既要间洁明了、计算方便,又要尽可能的接近实际路网情况。传统的路网描述一般采用节点和直线来简化描述道路路网,其中节点表示交叉口,直线段表示实际路网中的路段。一个实际的路网可抽象成由有向边和节点所组成的路网。这种简化描述很大程度上远离了实际道路状况,不能详细描述出现有的道路信息。为详细描述实际道路状况,使仿真效果更逼真自然,本文机动车路网采用路线轨迹法。它能将实际路网中具有不同线性、不同车道的路线详细描述出来。为详细描述实际道路状况,使仿真效果更逼真自然,本文机动车路网采用路线轨迹法。行人流一直是国内外交通仿真研究中较棘手的问题。它行为复杂运动无规律,不像机动车那样有统一的方向流,典型的行为如双向对头行驶、自由无规则的择路等。因此机动车/自行车规则的路网描述不适合行人的这种无规则运动。针对此问题本论文提出新的仿真思路:补充推广传统的节点路网描述,应用到行人的路网描述中。
节点路网描述的是叉路口无轨迹的临时实体行为情况,这很符合行人的无规则自由行为。但在传统节点中临时实体的运动行为是以物质流线的方式记录,不能确切表达行人在叉路口中的自由择路行为。
行人在Node中的行为判断规则如下:进入Node的矩阵坐标(i0,j0),出Node的矩阵坐标(id,jd),当前行人所在的位置(i ,j);如果i== id &&j== jd,行人即可搜索下游Link的Cell状态移出Node,否则若(i-id≠0)&&(j==jd)则i±1或(i==id)&&(j-jd≠0)则j±1,检测周边Cell状态随机择路来接近下游Link。
在永久实体建模方面人行道叉路口4个方向的道路采用双向路网重叠机制处理行人的双向对头行驶现象(进、出),有异于机动车道Link的单向行驶。交叉处行人的多方位自主择路机制基本满足了行人较自由的运动行态,在仿真实验中得到了良好的视觉效果。
5分层路网中混合交通流的实现
本论文中路网的机动车道、自行车道与行人道被标定为三个分离层,层与层之间相互独立又相互映射,每一临时实体都在自己所属的永久实体层上行驶但同时考虑相关的其它层的道路状况的影响。Cell的分层映射如图1:Link1上的第三个Cell与Link2上的三条Lane上的Cell重合映射,映射关系如下所示:
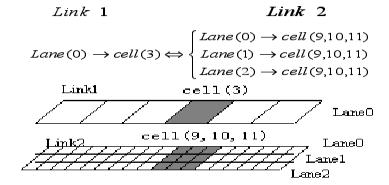
图1 cell的分层映射关系
在预先确定了不同层的Cell之间的对应关系后,搜索时从当前层的某个重合Cell出发,检测相应其它层中的对应Cell状态,将检测到的所有对应层的状态综合分析来确定当前层的状态,进而来判断当前临时实体下一时刻的行为。如此运用这种分层映射机制就能完全避免混合交通流中的碰撞行为,以实现效率最佳的动态混合交通流仿真系统。
6仿真系统的应用
通过对仿真区域微观交通流的评价分析,来判断路网设计的是否合理,交通控制方案是否达到期望效果等以提高路网的通行能力。图2是一校园十字交叉口实验简化的路网运行界面。通过多次运行实验得到的交叉口通行能力,如延迟时间、排队长度、进口道流量及平均速度等一些定量评价指标基本符合实际交通流参数。但难免会存有一些仿真误差,这就需要对系统的模型参数做出进一步的改善和扩充。

图2: 一校园交叉口的混合交通流实验界面
7结论
本文以现有交通仿真软件模型为基础,结合国内路况展开仿真机理及建模研究,提出新的算法思路。该算法着意在于城市道路混合交通流微观层次的相互影响分析,在有无交通灯控制标识时都可实现城市道路混合交通流仿真,尤其是小区混合交通流模拟。综上所述,本文为国内汽车/自行车/行人混合交通仿真的发展提出了新的仿真思路和方向,目前已完成了该仿真系统原型的面向对象的开发。
参考文献:
[1]毛保华,杨肇夏,陈海波.道路交通仿真技术与系统研究[J].北方交通大学学报,2002,26(5):37-46.
[2]邹智军,杨东援.道路交通仿真研究综述[J].交通运输工程学报,2001,1(2):83-88.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



