372928198802295275
摘要:针对目前水力机械电器系统中存在的控制周期长,效率低等缺点,采用 PID控制技术对电器系统进行控制。选择了一台具有代表性的电液油泵,对它的工作原理进行了深入的分析,并采用了一台单片机来获得它的供电频率,在经过了一个错误的检测之后,再将它的数据传输到一个控制主机中;其次,根据电力装置的供电模式,将供电频率分为若干等级,并将其输入相应的内存中;最后,对电力装置电源频率控制所涉及到的功率进行了分析,运用反馈线性化方法,对控制过程中所生成的频率进行了计算,并将 PID控制算法引入其中,在对比例系数、积分系数和微分系数进行持续调整的基础上,找到最优的参数,从而实现对电力装置电源频率的自动控制。试验证明,该方案能有效地实现对电液泵站的调频,并能使整个过程更加平稳,节省了大量的工时,提高了调频的效率,因此,该方案在实际中有着很高的实用价值。
关键字: PID控制器;电力装置供电频率;微控制器;内存;比例因子
前言
电力系统中,供电系统的工作频率是保证水力机器安全运转的基础。目前,对功率变换器的频率调节方式进行了深入的研究。在目前阶段,所提的电气设备电源频率控制方法中,大部分采用了微分中值定理,将非线性控制问题转化为线性协同控制问题,从而使算法变得更为复杂,从而造成了其在实际应用中,控制效率偏低,降低了液压机械的总体工作水平。
1电液油泵的组成和工作机理
轴向柱塞电液泵系由 PMSM的转子组合体和斜盘的轴向柱塞泵组成,实现了气缸的整体结构,并协同工作。在此泵中,柱塞是轴向布置的,并且气缸的轴线与推动轴的轴线相一致,它的进油口和出油口设置在泵体的两端,整体的流道围绕着泵体的侧壁,从而将因电机的定转子和各类摩擦而引起的热量都带走。柱塞运动角为0~180度时,由马达驱动其入缸,这时缸内的密封件就会变小,并由配油盘处的压力孔将油加注到压力孔中[1];当柱塞移动角度为180°~360°时,它将逐步向缸套外深处运动,此时,柱塞底部的密封工作容积将增大,由配油盘的吸油口进行吸油,这样往复,缸体每转1圈,柱塞就会完成吸油和压油各1次。
2用 PID技术实现电油泵的功率调频
2.1电液泵站的调频数据的提取和处理
通过单片机对电液油泵的电源频率进行采集,再通过通讯网络将其传输到控制主机,并进行后期的分析和处理。
2.2电液泵动源的频谱特征
根据工作条件的不同,对电力系统的要求也是不同的,根据电力系统的电力供应模式可以分为几类。为了保证各种类型的电力系统能够平稳地工作,需要对各种类型的电力系统中的电压、电压、电压等因素作进一步的研究。采用单片微处理器采集系统的工作状态,实现了对系统工作状态的实时监控。
2.3电液泵调频电路的功耗研究
从以上分析可以看出,在电液泵站工作情况下,其功率调频功率基本达到了均衡,与材料均衡有异曲同工之妙。通过对电液泵主功率进行调频控制,使功率输出呈现出十分显著的非线特征。
2.4对电器装置进行供电调频的实施
在当前的控制系统中, PID控制算法是一种应用最广泛和发展最成熟的一种调整方法。PID控制算法的具体实施是:将偏差值输入到算法中,分析比例系数、积分系数和微分系数之间的函数关系,按照这三个关系进行运算,得到最后的控制效果。
3试验检验
3.1试验程序和试验指标
为了检验本文的方法在实践中是否也具有同样的合理性和有效性,将其与导言中所提及的声波频谱分析以及自适应惯性频率控制方法进行了比较。试验用的是64位视窗专用版本,采用的是英特尔的i7处理器,4 GB的内存。
鉴于3种算法对试验环境的高要求,并且电动液压泵电源频率的自动控制比较复杂,本试验特地对基本操作空间的各种参数进行了改进,并按照电流流过的次数和电压数据的工作时间,进行了一系列的验证,具体内容如下:
a.收集电液泵的工作状况,标注出供电的中央,并在中央设置一个数据监视器,以便获得电力和气体的供电状况,避免出现停电和异常工作的现象。
b.利用相应的数据处理方法,对检测到的错误数据、冗余数据和无效数据进行实时剔除,以免对算法的试验结果造成太大的影响。对已被删除的数据点进行标注,并将其转移到主控台,以确保其实际可靠。并对基本运算空间内的各个参量进行了适时地修正,使之最大限度地符合三个演算法的需要。
c.根据电力供应模式将电力装置进行归类,将电力装置单独储存在相应的储存空间中,并且为每个储存空间设定一个适当的面积值[2]。如果某个存储器中的数据超过了一个地区的值,则要把这个数据排除出去,剩下的数据不会改变,然后,存储器会重新进行校验,然后调整控制信息,直到全部的数据都符合需求。
3.2试验研究的结论与结论
利用 MATALB软件进行了三种算法的比较试验,并进行了三种算法的比较试验。
首先,通过试验验证了三种不同的方法在不同速率下的性能,并将其与图1中的比较进行了比较。当所选的控制器速率较大时,则该方法在实现电液泵主频的自动化时,所选的控制器速率也较高;相反,其调控效果就会降低。

图1 3种算法控制波特率对比结果
从图1可以看出,当重复的数量越来越多时,采用该方法得到的控制波长速率总是最大的,而波动振幅也是最小的;用声谱法计算得到的波特率比用惯导频率法计算得到的波特率要高,而且波特率变化比较平缓,但是整体上比用该法计算得到的波特率要小。这是因为本文的方法采用了 PID控制算法,可以在不停地调节比例系数、积分系数以及微分系数的情况下,找到最优的参数,从而使电源频率控制的效果达到最佳。接着,运用3种不同的算法,实现了电力装置的电源频率的自动化,并将其所需的时间进行了比较,得到了图2的结果。
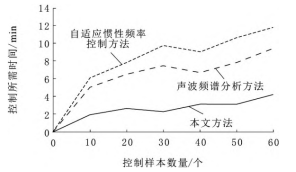
图2 3种算法电源频率控制时间对比结果
从图2可以清楚地看到,在控制样本数量相同的条件下,本文方法所需要的时间是最少的,其次是声波频谱分析方法,而自适应惯性频率控制方法所需要的时间最长。这是由于本文方法对采集到的电液泵电源频率信号进行了处理,去除了噪声和其他干扰因素,从而提高了算法的控制效率。通过三种不同的调频方法,比较了三种调频方法的调频效果,得出了图3的结论。

图3 3种算法控制有效率对比结果
由图3可知,本文所提的电液泵电源频率自动控制方法的有效率是最好的,其次是声波频谱分析方法,而自适应惯性频率控制方法的有效率是最差的。而且,我们的治疗方案中,有效率成长曲线整体呈现出一条线性的上升趋势,而其它两种方案则呈现出明显的起伏。
通过对以上3个实验的比较,可以看出,与其它2种方法比较,本发明的方法可达到整个电源频率控制过程最平稳,所需的时间最短,也能保证控制过程的有效率。
4结论
在常规的液压机械电气设备电源频率自动控制方法的基础上,它会导致控制时间较长、有效率过低和准确度较差等问题。因此,本文提出了一种以 PID控制算法为基础的液压机械电气设备电源频率自动控制方法。以电动液压泵为例子,在对其电源频率数据的采集、处理、分析和计算等一系列的工作之后,可以获得在电源频率在自动控制过程中所产生的频率,然后利用 PID控制算法,对其进行优化的参数的调节,从而达到对其的控制的目的,从而实现了对电动液压泵电源频率的自动控制。经过与其它两种算法的比较试验,证明了该算法的有效性。
参考文献
[1]吕永青,窦晓波,杨冬梅,等.含荷电状态修正和通信延 迟的储能电站负 荷 频 率 鲁 棒 控 制[J].电 力 系 统 自 动 化,2021,45(10):59-67.
[2]丁权,王鲁杨,陈宇宁,等.基于 VSG 的直流侧混合储 能自适应协调控制策略[J].电气传动,2021,51(21): 29-34.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



