(中车大连电力牵引研发中心有限公司,辽宁大连 116022)
摘要:本文对电力机车的网络控制逻辑优化方法进行介绍,解决了运营以来的关于辅助系统(ACU)控制逻辑产生的问题,经优化后,更加适用于线路的货运工作。
关键词:电力机车;网络控制系统;控制逻辑
作者简介:杨天奇(1992—)男,辽宁大连人,工程师。
1 引言
电力机车网络控制系统(TCMS)采用大连电牵公司的网络控制系统平台,列车级总线符合TCN标准,车辆级总线采用MVB总线,整个网络控制平台均为自主化研发的产品,能够实现整车信号的监测与控制。
2.网络拓扑结构
基于TCN国际标准(IEC61375-1)的车载网络控制系统,电力机车网络控制系统包含2个主处理单元(CCU)、2个网关(GW)、6个牵引控制单元(TCU)、2个辅助控制单元(ACU)、3个远程输入输出单元(RIOM)和2个司机显示单元(DDU),控制单元之间通过MVB总线连接。同时系统还与机车远程监视与诊断系统(CMD)和空气制动系统控制单元(BCU)通过MVB总线连接。具体拓扑结构如图1所示。

图1 电力机车TCMS网络拓扑结构
其中,微机控制柜安装了2个主处理单元(CCU1、2)、2网关(GW)和1个远程输入输出单元(RIOM3),变流柜1中安装了3个牵引控制单元(左TCU1、2、3)和1个辅助控制单元(ACU1),变流柜2中安装了3个牵引控制单元(右TCU1、2、3)和1个辅助控制单元(ACU2),司机室1中安装了1个司机显示单元(DDU1)、1个远程输入输出单元(RIOM1),司机室2中安
装了1个司机显示单元(DDU2)、1个远程输入输出单元(RIOM2)。远程输入输出单元RIOM1、RIOM2、RIOM3由若干个MVB/CAN模块、DI模块、DO模块和AIOM模块组成,各模块之间通过CAN总线连接。
3 网络控制逻辑优化
电力机车的网络控制系统可以实现列车级控制、机车级控制、驱动级控制等30多项控制要求,其中重要的功能有:受电弓管理、辅助变流控制、原边电压检测与控制、无人警惕管理。
3.1 ACU辅助隔离逻辑优化
型机车单节的辅助电源由两组辅助变流器、一组充电机电路和一组AC220V电路组成,其中辅助变流器一组为定频输出,另一组为变频输出。定频输出为泵类等不需要变频功能的负载供电,输出为AC380V,50Hz,变频输出为风机类需要变频功能的负载供电,三种输出方式AC380V(50Hz),AC304V(40Hz),AC190V(25Hz),两组变流器硬件电路和器件参数完全相同,主要由输入电路,中间电路和输出电路组成。定频负载如图2所示。变频负载如图3所示。

图2 定频负载结构图

图3 变频负载结构图
定频负载主要包括辅助变流器通风机1、辅助变流器通风机2、生活间380V、220V负载,水泵、油泵、空压机等,需要变频的负载主要包括牵引电机通风机1、牵引电机通风机2、冷却塔通风机1、冷却塔通风机2、机械间通风机1、机械间通风机2等。
在的机车原有逻辑中,未对ACU的通信故障采取隔离的控制逻辑,使得部分ACU1故障的机车在运行中频出线某一个ACU1在线和掉线的多次反复发生,这使得ACU1在线的时候整车仍采用其对辅助负载进行控制,然而通信质量较差的该时刻,ACU1并不能收到来自TCMS的控制指令,这使得ACU1所带的定频负载油泵、水泵等无法正常工作,而机车在运行中需要水泵和油泵冷却的设备温度温升又较快,当TCU检测到设备温度过高则发出断主断的指令,机车在断主断后,停车。
为了解决这个问题,TCMS对此处的逻辑进行了优化,将ACU的通信状态加入ACU启动的逻辑当中,当ACU都在线时,且两个ACU均未隔离,无故障,则当中间电压满足条件可以启动ACU,而当ACU出现故障时,则软件上隔离通信故障的ACU,即使该故障ACU恢复通信,也保持隔离的状态,使用救援模式下的ACU控制完成整车的负载供电工作。
3.2 仿真模式下辅助允许启动逻辑优化
由于机车在仿真模式下没有真的升起受电弓,受电弓无法从接触网上得到网压,从而牵引控制单元无法给出允许辅助运行信号,为了能让机车各系统顺利执行逻辑,需要做一个仿真变量给出允许辅助运行的状态,以此来完成机车上辅助部分的逻辑验证。具体流程见图4。

图4 HCD2C电力机车仿真模式下允许辅助系统启动示意图
3.3仿真模式下的压缩机启动逻辑
由于机车在仿真模式下没有真的升起受电弓,受电弓无法从接触网上得到网压,从而牵引控制单元无法通过四象限整流出中间电压提供给辅助系统,此时,由于辅助系统没有在中间母线上得到中间电压,也就无法反馈输出电压ok信号给压缩机启动指示,所以,在仿真模式下,采取辅助输出接触器的状态来代替输出电压ok信号,具体流程见图5所示。
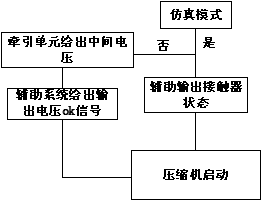
图5 电力机车仿真模式下压缩机启动示意图
4 辅助系统网络控制功能设计
4.1PRVMF 辅助触点监控
网络监控PRVMF列车准备电压主熔断器辅助触点,熔断器未熔断时,常开触点断开,给网络输出低电平信号;熔断器熔断时,常开触点闭合,给网络输出高电平信号。监控并记录此信号。
4.2 MVGCB 辅助触点监控
网络监控MVGCB中压接地断路器辅助触点,MVGCB断路器闭合时,辅助触点断开,给网络输出低电平信号;MVGCB断路器断开时,辅助触点闭合,给网络输出高电平信号。网络监控并记录此信号。
4.3 SIV OK 信号监控
辅助逆变器状态正常时,给网络输出高电平信号;辅助逆变器状态故障时,给网络输出低电平信号。网络监控并记录此信号。
4.4 BAMF1&2 辅助触点监控
网络监控BAMF1&2蓄电池主熔断器辅助触点,熔断器1和2未熔断时,常开触点断开,给网络输出低电平信号;熔断器1或2熔断时,常开触点闭合,给网络输出高电平信号。监控并记录此信号。
4.5 LVDR 辅助触点监控
网络监控LVDR低压检测继电器常开触点, 蓄电池电压低于84V时, LVDR失电常开触点断开,给网络输出低电平信号;蓄电池电压恢复到93V时,LVDR得电常开触点闭合,给网络输出高电平信号。网络监控并记录此信号。
4.6 BIS 辅助触点监控
网络监控BIS蓄电池隔离开关辅助触点,蓄电池隔离开关处于隔离位时,蓄电池隔离开关断开,给网络输出高电平信号;蓄电池隔离开关处于非隔离位时,蓄电池隔离开关闭合,给网络输出低电平信号。网络监控并记录此信号。
5 结束语
国产自主化技术应用较早的一代电力机车经过批量应用验证,该平台系统性能稳定,主控功能可满足现场的具体要求,目前在国内多个路局机务段承担着重要的货运运输的任务。
参考文献
[1]韩红彬,王晓鹏,鲁振山,吴子伟. HXD2系列电力机车CCU软件结构设计[J]. 铁道机车与动车,2017(08):4-7.
[2]王志国. 对HXD2型电力机车TCMS系统故障分析[J]. 内蒙古科技与经济,2017(17):93+95.
[3]田雅华,王晓鹏. 交流传动快速客运电力机车网络控制系统[J]. 电力机车与城轨车辆,2016,39(04):26-29.
[4]孙傲楠. 机车网络控制系统主处理单元的研究与实现[D].大连理工大学,2014.
[5]张丽红,李新,杨守君. HX_D3型交流传动电力机车网络控制系统[J]. 电力机车与城轨车辆,2008(01):20-22+30.
作者简介:杨天奇(1992—)男,辽宁大连人,工程师。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



