中国电建集团贵州工程有限公司
摘要:通过对除雪机器人的调研发现,无论是国内的一些科研单位以及研发生产单位还是国外的一些机器人生产公司,他们的机器人的推出亮点主要是在于对机器人的结构设计以及机械改进方面,很少有公司将重点放在除雪机器人的数据采集系统上。随着光伏项目的不断发展,屋顶光伏施工项目越来越多,对于北方的冬天,积雪太厚,要定期进行清理,否则安全隐患大大增加,除雪机器人需要采集分析的数据也越来越多,一些传统的数据采集系统主要是采用ARM进行控制,或者采用DSP进行控制,很少有将ARM与DSP结合在一起去作为除雪机器人的数据采集的核心控制部分的方案。利用ARM与DSP结合的方式去作为数据采集系统的核心控制部分,将对机器人的一些控制与数据进行分工处理,能够提高整个系统的处理效率,降低核心控制模块的工作负荷。该项目研究成果,可广泛应用于屋顶光伏项目,一定程度上解决了屋面除雪难题,若进一步研究,亦可减少因屋面高度较高,容易造成安全隐患的限制条件,同时增加屋面光伏项目对屋顶利用率。
关键词:除雪 数据采集 控制模块
一、系统总体方案
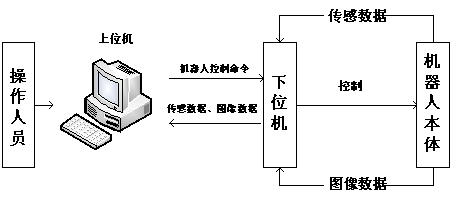
图1.1 系统总体方案
除雪机器人数据采集系统主要是被集成在下位机中,主要实现的是通过对周围环境数据信息的采集功能。如图1.1所示,工作人员通过上位机向机器人发送控制指令,除雪机器人通过自身携带的摄像头以及传感设备,将获取的传感信息和视频图像信息首先经过下位机的处理,然后经过无线通讯方式传输给上位机,操作人员通过对传感信息的判断以及对图像信息的识别从而去远程控制机器人的行为使其实现行走、躲避障碍、除雪等功能。下位机作为机器人的主要控制单元,在整个数据采集系统中位于核心地位,一方面它要完成对机器人采集到的视频信息以及传感信息进行处理并反馈给上位机,另一方面它还有通过对上位机发送过来控制指令进行判断,从而去控制机器人运动。
二、硬件设计
除雪机器人的数据采集系统的硬件设计部分主要由DSP+ARM主控模块、主控模块的时钟及配置电路、FLASH存储模块、DDR3缓存模块、电源模块、千兆以太网模块以及图像数据采集模块等多个部分组成。数据采集系统的主要工作流程为:ARM接收来自多路超声波传感器模块采集到的测距数据以及避障传感器模块发送过来的盲区数据,然后ARM将传感数据传输给DSP,DSP接收来自ARM的传感数据以及来自CMOS相机的视频数据,为了保证数据的实时性,将数据缓存到DDR3内部,经过DSP处理之后的图像数据经过千兆以太网接口通过无线路由传输给上位机,传感数据通过无线数据传输模块传输给上位机,上位机通过对数据进行判断然后发送给数据采集系统相应的控制机器人行为的指令,最后通过ARM向多组直流电机模块发送行为指令来控制机器人的行为。如图2.1为整个除雪机器人的数据采集系统的硬件系统框图。

图2.1 硬件系统框图
三、软件设计
DSP总体工作流程主要包括以下几个模块:主控模块,负责初始化数据结构、数据缓存区,初始化编码器等;视频采集模块,负责调用接口函数及采集缓存区的调度,使得视频采集设备能正常工作起来并获取有效的采集缓存区信息;编码器模块,使用默认参数进行编码;通信接口模块,主要是将视频数据以及传感数据通过通信接口外接无线设备传输给上位机,并且通过其中的一部分接口实现与RAM的通信。总体流程图如下图所示:
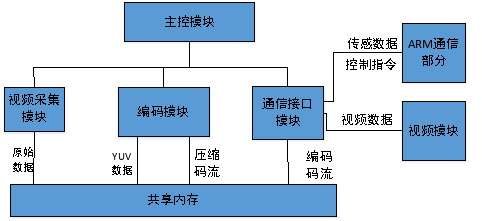
图3.1 DSP总体工作流程图
ARM软件开发环境:
STM32微处理器基于ARM核,所以很多基于ARM嵌入式开发环境都可用于STM32开发平台,开发工具都可用于STM32开发。选择合适的开发环境可以加快开发进度,节省开发成本。其中STM32F103VE作为STM32系列产品中的一员,常用的开发环境为Window环境和Linux环境,常用的开发工具为IAR EWARM工具和KEIL MDK工具。

图3.2 KEIL软件开发周期图
如图3.3为Keil uVision5软件开发界面:
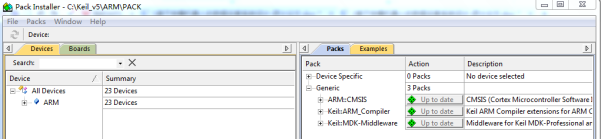
图3.3 Keil uVision5软件开发界面
四、软硬件环境搭建
软硬件调试环境搭建步骤:
(1)将数据采集单板的DSP调试用串口与上位机进行相连接,DSP的网口通过无线路由模块与上位机连接;
(2)将数据采集单板配置成串口启动模式,使用串口下载UBL和Uboot;
(3)下载完UBL和Uboot之后,打开虚拟机,开启一个终端,输入minicom-w设置好串口;
(4)给数据采集单板重新上电,串口将打印uboot启动信息,在执行“2….1.…0”两秒倒计时阶段,敲击键盘的回车键(Enter),打断uboot自动引导程序,如图5.9所示,进入uboot指令操作界面。

图4.1 uboot指令操作界面
五、优越性比较
在数据采集系统中采集的数据量比较大的数据主要有两类:机器人采集的传感数据与图像数据。数据采集系统采用DSP与ARM相结合的方式作为主控制模块,DSP通过其自身的外部接口XINTF与ARM进行数据传输,ARM通过接收DSP传输过来的数据然后产生电机控制信号去控制除雪机器人的行为;采用DDR3与FLASH作为数据的主要存储模块,其中利用DDR3的大容量高速的缓存技术能够满足数据采集的实时性,而FLASH主要是用作数据备份,避免数据的丢失;视频数据主要是利用功耗比较低的CMOS工业相机进行采集,传感器数据主要是来自于机器人身上的超声波传感器模块。数据采集系统是通过采集系统的千兆以太网接口连接外部的无线设备来实现与上位数据之间的通讯。
六、结束语
数据采集系统采用了DSP与ARM相结合的方式作为整个采集系统的核心控制部分,实现了对系统控制与数据采集的分工与模块化处理方式,大大降低了DSP与ARM的各自功耗,提升了整个控制系统的处理效率。
参考文献:
[1]刘巍.基于STM32的小型排障智能车设计与实现[D].河北大学,2013.
[2]范路桥,段班祥,周文琼等.基于计算机双目立体视觉的排爆机器人自动抓取的研究和实现[J].计算机与现代化,2013(8):192-196.
[3]王寅超.基于FPGA和DSP的嵌入式多通道数据采集与处理系统[D].华东师范大学,2012.
[4]李克新,刘泊.DSP数据采集处理系统在工务报警仪中的应用[J].哈尔滨理工大学学报,2003(6):54-57.
[5]王冬星,程书伟,张丽华.基于ARM的数据采集与存储系统的研究与实现[J].计算机工程与设计,2012,12(66):4526-4530.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



