(郑州经贸学院 智慧制造学院,河南郑州,451191)
摘要:本文首先分析了永磁同步电机的数学模型,结合永磁同步电机驱动系统,考虑在扰动情况下的数学模型变化,进一步应用滑模控制,设计了一种滑模控制器。同时,假设扰动可观测,设计了一种扰动观测器。最后,通过建立仿真模型,进行对比来验证新型控制策略的优势。
关键词:永磁同步电机;驱动系统;滑模控制;扰动观测器;控制策略
引言
在节约能源和环境保护日益受重视的今天,对于永磁同步电机PMSM(Permanent Magnet Synchronous Motor)的研究日益增多。PMSM具有功率密度高、效率高、噪音低、体积小和运行可靠等优点[1-2],所以在航空航天、数控机床、船舶推进、汽车与工业自动化等领域得到了广泛应用。在这些应用领域中,永磁同步电机常作为执行机构,起着举足轻重的作用,其控制性能与可靠性将直接影响整个系统的正常工作与安全运行。
在PMSM驱动系统中,由于扰动上界值不易确定,通常导致其控制策略不能有效实施。因此,考虑引入前馈补偿[3-5]以提高系统性能,前馈补偿能有助于控制器使用较小的切换增益,进而减小抖振。同时,如果扰动是可观测的,那么可以设计扰动观测器,并在对扰动的观测基础上进行前馈补偿,抖振减小的效果将更加明显,并可获得更快的动态响应和更小的电流纹波。本文提出一种基于扰动观测器的PMSM复合滑膜控制研究方法,从而可以提高系统的稳定性和可靠性。
1 分析PMSM数学模型
PMSM是一个复杂的电磁装置,为了分析其关键问题。假设电机的参数变化可以忽略,同时在不考虑外部干扰的情况下,可以建立PMSM的数学模型,以两相同步旋转d-q坐标系来进行分析,就可以得出PMSM的数学模型方程如下:
 (1)
(1)
式中ud、Id、Ld分别表示d轴上的电压、电流和电感;
uq、Iq、Lq分别表示q轴上的电压、电流和电感;
R---定子绕组电阻;ωm---电角速度; p---磁极对数;Ψf---转子永磁磁链。
2 在扰动情况下分析PMSM模型
结合PMSM数学模型,转子角速度ω和q轴上的电流iq的关系式为![]() (2)
(2)
式中![]() ---转子角速度,J---电机转动惯量,T1---负载转矩,B---摩擦系数。
---转子角速度,J---电机转动惯量,T1---负载转矩,B---摩擦系数。
对公式(2)进行拉普拉斯变换,同时对电流进行PI调节,可以得到:![]() (3)
(3)
式中S为拉普拉斯变换因子,ki和kp为PI调节的积分和比例系数,![]() 为q轴的电流。
为q轴的电流。
在系统存在扰动的情况下,对PMSM模型进行分析,可以对角速度进行二次微分方程和求解,则可以得到
![]() (4)
(4)
3 复合滑模控制器设计
20世纪50年代,前苏联学者提出了滑模变结构控制,其实质是一种非连续性控制,即一种系统结构随时间变化的开关间断控制。由于该应用方法对应用环境要求不高,控制方法简单,具有较强的鲁棒性,目前已经广泛应用于电机控制等领域。
考虑一般情况下的非线性系统:![]() (5),式中x为系统的状态变量,u为系统的控制变量。
(5),式中x为系统的状态变量,u为系统的控制变量。
设定滑模面函数s(x,t),求解控制器函数![]() =
=![]()
![]() =
=![]() i=1,2,3.....,m(6)
i=1,2,3.....,m(6)
其中,![]() ,就可以满足以下要求:滑模状态存在、保证滑模运动的稳定性、到达控制系统的动态品质要求。
,就可以满足以下要求:滑模状态存在、保证滑模运动的稳定性、到达控制系统的动态品质要求。
针对PMSM的转速控制,选取PMSM的状态变量为![]() 和
和![]() ,从而可以得到PMSM的动态系统方程为:
,从而可以得到PMSM的动态系统方程为:![]()
![]()
![]() (7),式中U为滑模控制器的输出电压。
(7),式中U为滑模控制器的输出电压。
具体的滑模控制器框图如图1所示,
 图1 PMSM的滑模控制器系统框图
图1 PMSM的滑模控制器系统框图
4 扰动观测器设计
在一般情况下,滑模控制器的切换增益必须大于扰动的上限值。假如扰动可以观测,就可以采用前馈补偿方式,将切换增益设置为大于扰动补偿误差的上界,因此扰动补偿误差通常比上限干扰值要小,所以可以有效降低系统的抖动。相应的建立的扰动观测器控制策略框图如图2所示: 
图2 加上扰动观测器的控制器设计
加上扰动观测器之后,需要进一步证明系统的稳定性。通过仿真实验可知,转速受到的扰动影响较小,并且抖动调节时间短,显示出较强的鲁棒性。
5仿真实验
为了验证基于扰动观测器的滑模控制器性能,基于MATLAB仿真平台,进行仿真和验证实验,在仿真实验过程中,PMSM的参数如下表1所示。
表1 PMSM参数表
参数 | 数值 |
额定功率Pe | 3kW |
极对数P | 3 |
定子电阻Rs | 0.8Ω |
d轴电感Ld | 0.005H |
q轴电感Lq | 0.005H |
转子永磁磁通ψf | 0.35Wb |
转动惯量J | 3.78·10-4kg/m3 |
试验设计为PMSMA在运行时,如图3所示,突然加上或者减去负载转矩时,采用传统的控制方法和采用复合滑膜控制时,d轴和q轴电流试验波形。明显的可以看出,在复合滑膜控制之下,电流相应更快,抖动更小。
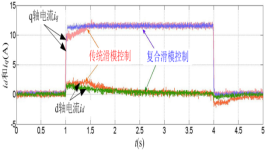
图3 负载转矩变化时的电流试验图
同时, 采用传统控制算法和采用复合滑模控制算法下电机稳态运行下的d轴电流波形细节,从图4中可以看出,新型控制策略作用下,电流的抖振明显减小。
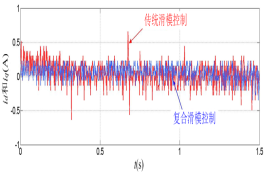
图4 电流稳态变化试验图
6结论
针对永磁同步电机的优化控制问题,本文设计了一种在扰动控制器下的滑模控制研究方法。通过理论分析和试验验证,可以得出以下结论:复合滑膜控制降低了电流抖动,并同时提高了系统动态响应速度;相比于传统的控制方法,复合滑膜控制的控制性能更好,对电机参数的鲁棒性更强。
参考文献
[1] 卢琴芬,孔浩,石佳蒙等.高速列车永磁同步牵引电机基于联合仿真模型的单脉冲控制研究[J]. 电工技术学报,2015,30(14):61-66.
[2] 孙继卫,刘秀梅,郭亚男等.基于扰动观测器的永磁同步电机复合滑模控制[J]. 电气传动,2018,48(2):14-18.
[3] 李龙飞,刘侃,李娟等.一种基于扰动观测器的永磁同步伺服电机复合滑模控制方法[J]. 电力与传动控制,2019,30(6):43-52.
[4] 谭光兴,苏荣键,芩满伟.基于扰动观测器的PMSM滑模控制[J]. 组合机床与自动化加工技术,2022,22(4):11-14.19.
[5] 季传坤,钱俊兵.基于重复滑模控制的PMSM的矢量控制系统[J]. 电子科技,2019,32(1):52-57.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



