浙江铂悦工业自动化有限公司 浙江省宁波市315000
摘要:门锁钩作为门锁其中的一部分,在加工的过程中主要是靠铆接来制造的,而目前门锁钩的铆接主要是通过工作人员将所需铆压环放置于铆压机下,通过铆压机将铆压环压入所需铆压环内,效率较低,还有改进的空间。现设计出了一种门锁钩自动铆接装置,能够大大提高门锁钩的铆压效率。本文从多角度介绍了这种装置。
关键词:门锁钩 自动铆接 铆压效率
前言
门锁是家居安全的重要组成部分,而锁钩作为门锁的关键部件,其质量和性能直接关系到门锁的安全性和可靠性。随着工业技术的发展,越来越多的生产企业开始关注如何提高锁钩的制造效率和品质。因此,研究一种能够实现自动铆接的门锁钩制造装置,对于提高生产效率、降低成本、保证产品质量具有重要意义。
但是目前门锁钩的铆接主要是通过工作人员将所需铆压环放置于铆压机下,通过铆压机将铆压环压入所需铆压环内,效率较低,还需改进。因此需要一种自动铆接装置,以克服上述现有技术的缺点。
1铆接问题与挑战
铆接技术作为一种简洁、实用的技术手段,已经被我们广泛使用。它的优点是重量轻、成本低、工艺简便,因而应用非常普遍,从小零件到航空航天,都有它的身影,可谓“功不可没”。
铆接技术是当今世界机械连接的先进技术之一,简单地说,铆接是用铆钉把两个物体连接起来。相比于其他新兴的技术,铆接技术起步较晚,而且前期发展相对缓慢,主要原因是传统铆接工艺面临众多的问题,大大阻碍了它发展的脚步。但是近年来在高性能飞机的研发等高端领域中,为了满足结构设计,它的优势再次受到人们的重视,各种新型铆接工艺也在飞速地发展。
1.1普通铆接工艺强度不足
铆接工艺采用过盈配合,为了能满足结构的可靠性、安全性、承载能力等各方面要求,对铆接材料要求也越来越苛刻。传统的铆接工艺,要实现均匀的过盈配合比较困难,对于后夹层结构,普通铆接很难做到压力均匀分布到每个铆钉,更给结构稳定带来了隐患,限制了铆接工艺的发展。
1.2新型轻质材料不能满足铆接要求
各种高端领域中,比如新型飞机的研发,要求结构减重,所以普通金属再也满足不了这种需求,必须采用新型材料。如今,应用最广泛的当属钛合金,但是普通铆接方法铆接钛合金时铆钉易产生裂纹,这显然是不可取的。当然,采用热铆可以解决这一问题,但是热铆填充质量太差,接头疲劳强度低,更从根本上违背了铆接的要求。而且,对于复合材料,由于其本身性能的限制,根本不能采用热铆,也正是因为这样的原因,铆接技术进入瓶颈期。
1.3大直径铆接难以实现
随着科技的发展,大直径铆接用得越来越多。我们知道,大直径的铆接必须采用手铆,但是铆接过程中会产生巨大的后坐力和噪声,难以忍受,对工人健康和生产效率都有严重的影响,这也是阻碍铆接技术发展的巨大障碍。
2门锁钩自动铆接装置发展趋势与前景
首先,随着人工智能技术的快速发展,门锁钩自动铆接装置可以通过智能化技术实现更高的自动化水平。例如,装置可以通过视觉识别系统准确定位门锁钩的位置和姿态,从而精确地进行铆接。这将大大提高生产效率和产品质量,并减少人工操作的错误。
其次,随着工业机器人技术的成熟和应用范围的拓展,门锁钩自动铆接装置可以与工业机器人进行集成,形成柔性生产线。这将使得装置在不同的生产环境下能够灵活地适应不同的门锁钩铆接需求,提高生产线的适应性和灵活性。
另外,随着可持续发展理念的深入推进,门锁钩自动铆接装置在节能和环保方面具有优势。装置可以通过优化设计,减少能源消耗和废料产生,从而降低生产过程中的环境影响。这与当前社会对于绿色制造的要求相契合,有利于提升装置在市场上的竞争力。
未来,随着数字化技术的发展和应用,门锁钩自动铆接装置还可以进一步实现远程监控和远程操作功能,实现无人化生产。这将为企业提供更多的便利和灵活性,同时减少人力资源的需求和成本。
3技术方案
门锁钩自动铆接装置,包括第一滑轨1,在两个第一滑轨1上滑动连接有滑动台2,滑动台2的截面呈矩形设置,门锁钩34于其端部设置有定位板4而且在定位板4上开设有限位孔5,配合于限位孔5,滑动台2设置有用于穿设过限位孔5的限位杆3,而为了在保证限位杆3对门锁钩34限位的同时还能进一步方便定位板4的插入,限位杆3于远离滑动台2的一侧圆台设置。
门锁钩自动铆接装置在靠近限位杆3的一侧设置有滑轨道6,在滑轨道6上滑动连接有第一滑动件7,第一滑动件7纵向滑动连接有纵向移动块33,纵向移动块33转动连接于第一转动气缸8,第一转动气缸8连接有用于夹持门锁钩34的第一机械手9。

图 1
整体地工作过程如下:
首先将门锁钩34放置于滑动台2上,并通过限位杆3限制门锁钩34的位置,以避免门锁钩34在使用过程中发生位置的偏移。然后启动第一滑动件7滑动至靠近门锁钩34的一侧并通过第一机械手9抓取门锁钩34并移动第一滑动件7至放置台10,将门锁钩34放置于放置台10上。接着上述过程,纵向移动组件降低第二机械手13的位置以抓取门锁钩34,同时通过第三机械手17抓取通过筛选机构的铆压环35并通过第二转动气缸16将铆压环35放置于限位环20上以限制铆压环35发生移动。之后,将第二机械手13将门锁钩34放置于铆压环35上,并通过冲压台19使门锁钩34和铆压环35之间发生铆接。

图 2
4相对优势
1、采用上述方案,通过限位杆的设置可以实现对门锁钩的限位,第一机械手的设置有利于抓取门锁钩,而放置台的设置方便门锁钩在中途的放置,而第二滑轨、第二滑动件的设置方便了门锁钩进行水平得意移动,最后通过机械手将相应的门锁钩放置于安置台上,并且通过铆压机将门锁钩压入铆压环内,从而实现两者间的铆接,通过以上过程加快了门锁钩的铆压效率。
2、限位杆于远离滑动台的一侧呈圆台设置,可以大大方便门锁钩
脱离限位杆。纵向移动组件包括分别放置于第二滑轨两端且固定连接于第二滑轨的固定板,以及螺纹穿射于固定板的螺杆、位于螺杆上方的转动盘、位于螺杆和转动盘之间以驱动转动盘转动的转动电机,两所述转动盘之间套设有传动带。
3、通过固定板、螺杆、转动电机的设置有利于第二滑轨上下位置的移动,而且通过在两转动盘之间的传动带设置,大大方便了螺杆的上下移动,从而实现了第二滑轨位置移动。安置台上设置有用于限制铆压环发生移动的限位环。
4、通过限位环的设置可以有效限制放置于安置台上的铆压环发生位移,从而造成门锁钩和铆压环之间的铆压发生偏差。门锁钩自动铆接装置还包括设置于靠近铆压机一侧以用于传送铆压环至靠近第二转动气缸的传送机构,以及设置于远离第二转动气缸且连接于传送机构以用于筛选出符合要求的铆压环并传送于传送结构的筛选机构。
5、通过筛选机构的设置有利于筛选出符合要求的门锁钩,而传送机构的设置有利于符合要求的铆压环进行传送,通过两者的结合,大大提高了所要进行铆压的铆压环的标准性。通过第一水平移动组件的设置方便了铆压换的水平移动,而第二水平移动组件的设置有利于铆压环传送到靠近第二转动气缸的附近。第一水平移动组件包括用于传送铆压环的传送道以及设置于传送道上方且位于铆压环上方以纵向限制铆压环纵向位置的纵向限制板。
6、纵向限制板的设置有利于进一步排除不符合要求的铆压环进行传送,而传送道的设置有利于铆压换进行位移。第二水平移动组件包括设置于靠近第二转动气缸以用于容置铆压环的移动板以及用于推动移动板至靠近第二转动气缸的推动气缸。通过推动气缸的设置有利于移动板的移动,而随着移动板的移动方便了第三机械手抓取铆压环。
7、筛选台于靠近盘旋通道一侧设置有用于呈圆弧设置且高于标准铆压环以限制超标铆压环传送至传送道的限高环。通过盘旋通道的设置有利于将铆压环进行盘旋上升,方便重复筛选其中符合要求的铆压环,并且能够将不符合规定的铆压环返回,结合限位环的设置有利于限制不合格铆压环的传送。限高环呈弯曲设置,盘旋通道于靠近传送到之前开设有限位开口以用于筛选掉底面积小于标准铆压环的铆压环。通过限位开口的设置有利于筛选掉不符合要求规定的铆压环。
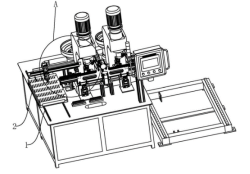
图 3
5结语
在未来有着广阔的发展前景。通过智能化技术、工业机器人技术和可持续发展理念的应用,装置可以提高生产效率和质量,提高生产线的灵活性和适应性,并减少能源消耗和环境影响。随着数字化技术的发展,装置还可以实现远程操作功能,进一步提升生产的便利性和灵活性。门锁钩自动铆接装置将对产业发展将起到积极的推动作用。
参考文献
[1] 王晓红,李继猛,田晓波.自动铆接技术的研究与发展[J].制造业自动化,2019,41(11): 6-9.
[2]张建强,刘志超,马岩.机械手臂在自动化铆接中的应用[J].机械设计与制造,2020,28(3):19-22.
[3]陈亮,李庆达,刘丽丽.基于PLC的自动铆接控制系统设计[J].制造业自动化,2021,43(3): 18-21.
[4] 基于GPRS的智能门锁系统设计与实现[J]. 于浩;赵玉荣;刘炎铭;刘大伟;张环宇.电子制作,2021(09)
[5] 检验中常见的门锁短接现象[J]. 李玉军;张庆山.特种设备安全技术,2022(04)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



