民航福建空管分局技术保障部
摘 要:随着多年来民用航空业的高速发展,人民对飞行安全的关注也与日俱增。空管行业是保障飞行安全非常重要的一环,为了适应新发展要求,各地区空管局不断加大配套设施设备的投入。其中空管二次雷达的数量不断增加,一方面二次雷达数量的增加的确提高了主要航路、航线的冗余覆盖,另一方面则增加了出现异步干扰的概率
关键词:常规二次雷达;异步干扰概率;主瓣询问;旁瓣询问
引言
异步干扰(False Replies Unsynchronized to Interrogator Transmission,FRUIT)在行业规范文件中定义为:二次监视雷达收到其他二次监视雷达询问应答所引起的干扰。异步干扰情况往往是在多重雷达覆盖区域内出现,如果目标应答机处在多个二次雷达询问机的作用范围内,应答机的应答除了会被本地的询问机接收外,还会被邻近同类型询问机接收。即本地询问机不仅接收到了本地询问所触发的应答,这些应答是正确的同步应答;还可能接收到其他邻近询问机所触发的不同步应答。显然,这些不同步应答对于本地询问机而言是多余的,会引起所谓的异步干扰。
一、异步干扰
目前机载应答机一般是采用全向天线,在空间360度方位内均能接收询问信号。这些询问信号通常不只是一个询问机发来的,实际上应答机凡是接收到超过最小触发电平的询问信号都会产生一个应答信号,并在整个空间全方位辐射。在图1.1所示的几何示意图中,假定目标处在站A和站B的有效询问作用距离之内,以站B对站A形成异步干扰为例讨论。站B对目标代码(或高度)询问后,目标的应答信号被站A接收,如果站A正好处于代码(或高度)询问后的接收状态,将会把应答信号解码为代码(或高度),但根据接收到的时间推算出距离不正确,在同一方位上将出现两个相同代码(或高度)的目标,其中一个目标的距离显示是正确的,即图1.1中的R1,而另一个距离显示不正确;如果站B对目标代码(或高度)询问后,目标的应答信号被站A接收,此时如果站A正好处于高度(或代码)询问后的接收状态,将会把应答信号解码为高度(或代码),根据接收到的时间推算出距离还是不正确,站A会解出一个距离显示和高度(或代码)都不正确的虚假目标。同理,站A也可能对站B形成相同的异步干扰。
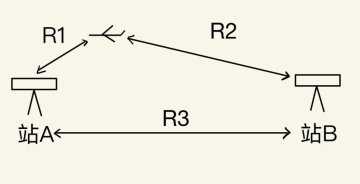
图1.1 邻近询问机与异步干扰示意图
图1.2所示,为主瓣与副瓣异步干扰应答的几种情况,图中只分析了两个站一个目标的简单情况。(a)表示目标处在站A主瓣、站B主瓣内;(b)表示目标处在站A主瓣、站B旁瓣内;(c)表示目标处在站A旁瓣、站B旁瓣内;(d)表示目标处在站A旁瓣、站B主瓣内。
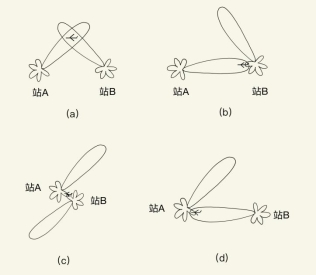
图1.2 主瓣/旁瓣异步干扰示意图
根据中国民航行业规范文件《MH-T 4010-2016空中交通管制二次监视雷达系统技术规范》中对波束宽度的技术规定,二次雷达天线的波束宽度应满足应答信号检查和解码处理的要求。采用单脉冲体制时:a)3dB波束宽度应为2.45o![]() 0.25o;b)10dB波束宽度应不大于4.5o;c)20dB波束宽度应不大于7o。假定主瓣有效的询问宽度为5o左右,τr为一个 应答脉冲组占据的时间,Tr为站A二次雷达的询问重复周期。则图1.2中4种情况站B对站A造成异步干扰的概率总结如下。
0.25o;b)10dB波束宽度应不大于4.5o;c)20dB波束宽度应不大于7o。假定主瓣有效的询问宽度为5o左右,τr为一个 应答脉冲组占据的时间,Tr为站A二次雷达的询问重复周期。则图1.2中4种情况站B对站A造成异步干扰的概率总结如下。
表1.1 询问机受到异步干扰的概率
站A受到异步干扰概率 | |
目标处在站A主瓣、站B主瓣内 | (5o/360o)·(5o/360o)·(2τr/Tr) |
目标处在站A主瓣、站B旁瓣内 | (5o/360o)·((360o-5o)/360o)·(2τr/Tr) |
目标处在站A旁瓣、站B旁瓣内 | ((360o-5o)/360o)·((360o-5o)/360o)·(2τr/Tr) |
目标处在站A旁瓣、站B主瓣内 | ((360o-5o)/360o)·(5o/360o)·(2τr/Tr) |
目前空管二次雷达基本满足国际民航组织相关规范,一般都采用了询问旁瓣抑制技术(ISLS)和接收旁瓣抑制技术(RSLS),因此从旁瓣接收到的异步干扰基本都能被剔除。而主瓣内接收到的异步干扰还是存在概率的。现代二次雷达在生成点迹时也往往需要多个点迹的稳定同步,因此从概率上来说若两部二次雷达的询问频率不同,能稳定产生异步干扰的概率就更低。
二、异步干扰式窜扰概率
当某些二次雷达的脉冲重复频率一致时,情况就变得越发复杂。这种异步干扰应答会类似同步应答,不会被后续的应答处理器或者录取器过滤掉。特别多部雷达同时覆盖的空域,以及某空域的飞机出现集群时候,该现象出现的概率会显著增加。
(一)图2.1所示,假定某空域只有一部二次雷达A1,其主瓣询问波束内有B1、B2、B3共3个目标。二次雷达A1接收到的应答信号分别为图2.2中的y1B1、y1B2、y1B3。图中简化了常规模式应答框架脉冲F1F2,以一个脉冲代替应答脉冲组。脉冲组持续时长为τr。当有邻近的目标到二次雷达A1的距离差小于τ
r时,也就是B2、B3如果距离B1非常近,那么y1B1、y1B2、y1B3这3个脉冲组很可能会互相占用脉冲位置,就发生了应答信号的窜扰。窜扰会影响应答处理器对应答信号的判定和解码,产生解码错误或者丢掉应答。
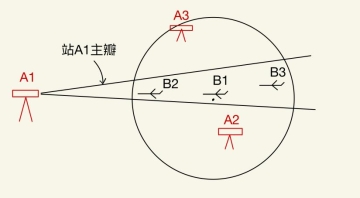
图2.1
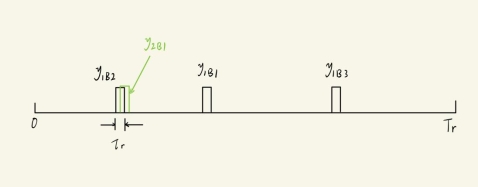
图2.2
(二)在以上情况下,如果目标B1为圆心的区域内还有第二部二次雷达A2,如图2.1所示。二次雷达A1有可能接收到由二次雷达A2询问目标B1引起的应答信号y2B1,即图2.2中的绿色脉冲。y2B1的位置存在如下3中情况。①y2B1不与其他应答信号重叠情况下,会发生一般的异步干扰,只要该干扰不稳定同步,不会对后续点迹处理输出造成影响。②y2B1可能落在y1B2附近或者与之重叠,对应概率为2τr/ Tr,Tr为二次雷达A1的脉冲重复周期。③y2B1可能落在y1B1、y1B3附近或者与之重叠,其概率均为2τr/ Tr。
(三)在(二)的基础上,如果还有第3部雷达A3,如图2.1所示。那么出现异步干扰的概率分析同(二)中所述情况一致。
综合以上分析,图2.1所示多部雷达多个目标的情况下。对于二次雷达A1,发生异步干扰式窜扰的概率为
N*M*(2τr/ Tr) (式1)
式中N为图2.1中目标B1为圆心的区域内二次雷达个数;M为图2.1中二次雷达A1主瓣内的目标数量。根据国际民航组织的标准文件,τr=(20.3+0.45)us;Tr=1/fr;fr在150Hz至450Hz之间连续可调,如果N=3,M=3。则估算概率在0.0560至0.1680之间。如果这种干扰应答被稳定地同步接收,后续处理过程就会出现解码错误。
三、结语
在上述分析中可以得出如下结论:某部二次雷达询问产生窜扰的概率与被询问目标与其相邻其他目标之间的时间间隔有关。被询问的目标受到区域内其他二次雷达询问产生的异步干扰,是由该区域内各二次雷达的Tr是否相同决定。如果这种异步干扰接近于稳定地同步应答,现代二次雷达在后续的应答处理或者录取处理时可能无法将这种干扰滤除。根据(式1)可知,概率值与区域内二次雷达的站点个数、以及空中目标的个数有关。其中目标的个数是一个很难去改变的量,甚至随着民用航空业的发展,空中目标的密度将会越来越大。因此如果想减小概率值需要合理考虑二次雷达的位置分布,区域内应减小二次雷达的布站密度;另外还可以根据实际情况,如根据作用距离的实际需求,合理增大所辖二次雷达的Tr数值、或者采用Tr参差技术等均能减小异步干扰出现的概率。
参考文献
[1]国际民用航空公约附件10.第四版.2007
[2]MH-T 4010-2016空中交通管制二次监视雷达系统技术规范
[3]雷达原理(第四版).电子工业出版社.2009
[4]二次雷达原理.国防工业出版社.2009
[5]空管二次雷达.国防工业出版社.2017

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



