(1.青岛港国际股份有限公司董家口分公司,山东青岛,266000)
摘要:针对传统散货门机设备在作业时仍需专业司机人工操作,抓斗精确抓料位置不易控制,存在抓斗撞击船舱风险等问题,研发了一种适用于自动化门机改造的激光船型扫描系统。船型扫描系统由IPC(嵌入式工控机)、3D扫描仪、GPS(定位系统)、PLC(控制器)、上位机触摸屏、数据交换机等构成,各传感器与控制器通过以太网协议进行数据交换,可实现门机各机构的精准定位。目前该系统已投入使用,工作状态稳定,作业安全高效。
关键词:门座式起重机自动化;激光扫描;船型扫描;
1 研发背景
传统散货门机设备在作业时仍需专业司机在司机室通过操控手柄进行抓斗入舱、抓料卸船操作。由于变幅带动抓斗运行下降到船舱过程惯性很大,人工操作抓斗精确抓料的位置不易控制,并存在抓斗撞击船舱风险。
对于两侧有立式舱盖板的船,门机抓斗在进出船舱时容易碰到两侧的舱盖板,司机只能通过肉眼观察抓斗与舱盖板的距离,疲劳后容易产生碰撞等安全事故。门机进行卸船作业时,由于不同门机的作业效率和船舱内货物种类不同,导致作业时船易发生左右、或前后倾斜,导致船身不稳定,严重时发生翻船事故。
2 研发内容
2.1 系统概述
船型扫描系统由IPC、3D扫描仪、GPS、PLC、上位机触摸屏、数据交换机等构成,各传感器与控制器通过以太网协议进行数据交换,如图1所示。通过3D扫描仪采集船舱及船型数据、GPS定位门机的机构位置,采集到的点云数据和GPS定位数据传输到IPC中处理,IPC处理后将船舱内货物数据展示,并将船型与门机的安全防护距离传送给PLC,由PLC控制门机安全进行抓取料动作,司机可以通过上位机触摸屏选取门机的抓料点。
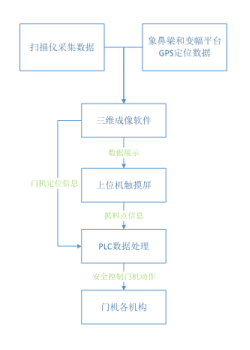
图1 扫描系统结构图
2.2系统工作原理
为了掌握船舱及舱内货物的实际情况,需要在象鼻梁上及回转平台上安装3D 扫描仪及云台,对船舱口和舱内物料进行动态实时扫描和仿真处理,形成三维图像及舱口、料堆等作业信息数据库。数据采集控制器采集船型,天气涌浪等数据,记录天气涌浪对船舱晃动影响等数据,把数据存放在数据库里,根据不同的船型、天气涌浪信息来调用不同的数据。
2.3三维模型轮廓原理
利用激光扫描结合云台动态捕捉进行船体三维建模,获取船体表面三维数据。在应用过程中,采取机激光结合云台运动、对时间进行积分从而达到大范围的三维物理建模,激光扫描获取到的点云数据直接上传至服务器。
船型扫描系统可以自动为门机规划最优作业路径,并将该信息转化为PLC 控制指令,数据采集处理与三维成像软件与 PLC 控制系统之间数据实时交互,实现抓斗平稳、精确落入最佳取料点,同时稳定地在该区域进行抓取作业。
门机在进行装卸作业时,船舱会因负载不平衡导致船倾斜的情况。利用3D扫描仪扫描出船舱的基本数据,在船型扫描系统中计算船舱四个边与地面之间的高度,根据这四个高度判断船是否有倾斜的情况,计算出下一个取料的三维坐标,并驱动门机各机构到达最佳取料点坐标。
船型扫描系统自动计算最佳抓料点,并将该动作转化为 PLC 控制指令,数据采集处理与三维成像系统与 PLC 控制系统之间数据实时交互,实现回转变幅带动抓斗平稳、精确落入最佳抓料点进行抓料卸船。
3 功能实现方式
3.1 船型扫描系统的数据标定
将GPS和3D扫描仪安装在门机的相应位置后,需要进行对门机抓斗位置、与门机位置进行数据标定,以达到精准定位门机各机构目的。
(1)象鼻梁与抓斗位置标定

图2象鼻梁俯视图
上图2为象鼻梁的一个俯视图,A、D两点分别为起升、开闭钢丝绳滑轮的外边缘,分别测量出扫描仪与钢丝绳距离GPS的三维方向的距离。这样,在船型扫描系统中,就有了对于门机抓斗位置、变幅伸缩位置的定位数据。
(2)门机位置标定
使用船型扫描系统的数据采集版本定位出门机自身的位置。修改目前使用的GPS配置文件后打开船型扫描系统的数据采集版本。数据采集需要让门机的回转机构慢速旋转两圈,旋转的中心即门机的中心位置,船型扫描系统会在门机旋转的同时采集数据。采集结束后,将整个船型扫描系统的数据采集版本文件夹传回即可。
(3)门机象鼻梁3D扫描仪标定
打开之前需要将目前使用的3D扫描仪配置文件修改,后打开船型扫描系统的数据采集版本,在Calibration Motions 区域依次单击Cal_move1与Cal_move2,执行一条指令后等待云台旋转角度Pan与Tilt均归零一段时间后在单击另一个按钮,后将船型扫描系统的数据采集版本文件夹传回即可。
3.2船型扫描系统的使用
(1)打开船型扫描系统最新版本的文件夹,在空白处右击,选择打开终端。
(2)在出现的命令界面输入命令sudo./ portal_crane_unloader,回车后输入密码并回车,打开船型扫描系统软件。
(3)点击cal_Move_1或者cal_Move_2,红色矩形框内的set pan 可以设置特定的水平旋转角;set titl可以设置特定的上下俯仰角。
(4)PLC中发送扫描命令,云台自动扫描后,点击show pile,即出现扫描界面。
4结语
本文针对传统散货门机设备在作业时仍需专业司机人工操作,抓斗精确抓料位置不易控制等问题,研发了一种自动化门机激光船型扫描系统。船型扫描系统由IPC、3D扫描仪、GPS、PLC、上位机触摸屏、数据交换机等构成,各传感器与控制器通过以太网协议进行数据交换,可实现门机各机构的精准定位,为后续轮胎吊、桥吊等特种设备自动化升级改造提供了新思路。
参考文献
[1] 濮良贵,陈国定,吴立言.机械设计[M]. 北京:高等教育出版社,2013:303-305.
[2] 刘泽九,贺士荃. 滚动轴承的额定载荷与寿命[M]. 北京:机械工业出版社,1982.06:20-31.
[3] 张晋西,程亭森,袁腾飞,等.SolidWorks Simulation 二次开发在轮毂轴承中的应用[J].重庆理工大学学报(自然科学版),2016,30(8):31-35.
[4] 黄烈文,王杰,李祥.基于SolidWorks的可倾瓦推力轴承的二次开发[J]. 机械,2015,(9):14-16.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



