中核四0四有限公司,甘肃 兰州 732850
摘要:针对核设施退役过程中设备室内辐射水平高、作业空间有限、人员难以接近等退役难题,开发研制了专用拆解机器人,配备多种工具头,通过作业流程规划顺利实现了对模拟设备室内设备和管线的拆除,验证了拆解机器人的可行性,获取了关键操作参数。为后处理设施设备室退役提供了可靠保障。
关键词:核设施;设备室;退役;机器人;远距离拆解
我国自二十世纪九十年代启动退役治理工作,截至目前已经完成了某反应堆和多条核化工生产线的阶段性退役工作[1]。退役实施过程中,为减少人员受照,多采用机器人远距离遥控作业的方式,国内也在退役机器人开发方面做了诸多研究[2-4]。为解决某后处理生产线设备室退役的难题,我公司搭建了模拟设备室,并设计开发了适用于强辐射场环境下、人员无法达到区域的拆解机器人。机器人可携带三维扫描仪、热点探测仪实现设备室内部三维重构以及剂量场分布情况,通过拆解工具头对设备室内的所有设备和管道进行拆解和装桶。通过开展模拟设备室拆除试验,为后续工程实施提供技术支持。
1 远距离拆解机器人系统
1.1 拆解机器人组成
拆解机器人系统由机器人主臂(多级伸缩臂)、机器人作业臂、主承载平台、机器人控制系统及软件系统组成。
机器人主臂为多级伸缩臂结构形式,具有1轴,电机驱动,包含多级伸缩臂系统由定滑轮组合、多级伸缩臂组合、收线器装置和其他附件。
机器人作业臂具有6轴,其中包含三个相邻的平行轴,具有封闭形式解,所有轴都由电机驱动,具有断电保护功能,停电状态下可以稳定有效保持原有姿态。
1.2 拆解机器人系统功能
1.2.1主承载平台
主承载平台能够实现对主臂机器人的良好定位支撑,并能够在外部作用力推动下快速移动,同时具有到位锁定功能,运动到指定作业工位后,人工锁定运动装置固定当前位置,待拆解作业结束后,再由人工解锁运动装置完成设备回收。
主承载平台总体为框架结构,采用316L不锈钢矩管搭建,四个福马轮安装在四角,对机器人本体起到支承、移动和调平的作用,中间部分留出空间用于伸缩臂系统和作业机器人向下延伸。
1.2.2机器人主臂
机器人主臂实现对作业机器人良好支撑,使机器人作业臂能够下潜至设备室内任意深度工作并能够实现可控伸缩功能。系统由定滑轮组合、多级伸缩臂组合、收线器装置和其他附件组成,共有1个轴,由伺服电机驱动。
1.2.3 机器人作业臂
机器人作业臂是一台针对具有较大工作范围和高负载轻自重要求开发的六轴机器人,其作业半径可达2.6 m,负载自重比高达1:4,末端最大负载80kg。末端设有快换装置,能够连接夹钳、锯切冷切割工具、等离子切割枪等不同末端执行器以适应不同作业需求。该设备安装在主臂机器人末端,跟随主臂机器人展开后到达作业位置,完成作业任务后随主臂机器人撤出作业环境。
2 模拟设备室拆除
2.1 模拟设备室结构
为测试及展示智能化拆解机器人性能,基于实际设备室内部管道、贮槽及混合澄清槽等代表性的部件,按照1:1比例搭建了模拟设备室。模拟设备室尺寸为7.5×4.5×7.2米,其结构示意如图1所示。智能化拆解机器人在其上方开展整机性能测试。

图1 模拟设备室示意图
2.2 模拟设备室拆除流程
结合设备室内部构件拆除实际需求,对模拟设备室拆除流程进行规划。机器人拆解作业主要分为准备工作、作业工作和收尾工作,其中准备工作主要是机器人在地面以上为实现设备室内部拆解工作而做的准备工作,主要包括作业环境搭建、机器人就位等;作业工作主要是模拟设备室内部拆解工作,主要包括三维重建、作业规划、切割作业、回取作业;收尾工作是设备拆解回取工作结束后的现场处理工作,主要包括气帐拆除、机器人系统及附属设备拆除、盖上盖板等工作。
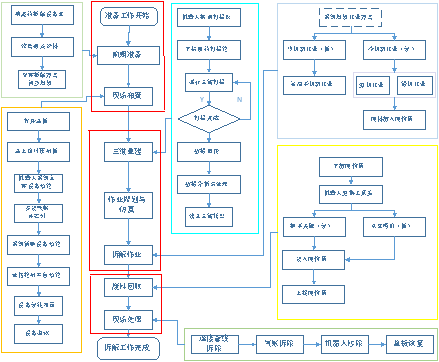
图2 机器人拆解作业流程图
2.3 拆解模拟设备室效果评价
利用拆解机器人对上述模拟设备室的管道、卧式贮槽、立式贮槽、混合澄清槽进行拆解作业。采用三维激光扫描构建了模拟设备室内部构造三维模型,耗时80h;规划机器人系统作业方案并开展三维仿真优化,耗时8h;采用等离子体工具头对立式贮槽1和卧式贮槽实施切割作业,共切成36块,耗时55h;通过圆盘锯将管径Φ20-38mm的管道约12m,切成400mm的管段并通过夹钳将其装入200L废物桶中,耗时30h。
通过验证,拆解机器人的三维模型重构、作业规划、冷热切割、废物拾取等功能均得到了验证且具有可操作性,对真实设备室的退役拆解具有指导意义。
3结语
针对后处理设备室放射性水平高、作业难度大的特点,开发了自动化程度高、可远距离作业的拆解机器人,并开展了模拟设备室的拆解验证工作。结果表明,拆解机器人的主要设计功能得到实现,开展设备室内构件拆除作业是切实可行的。这为后续退役核设施的远距离拆除实施提供了技术支持及保障,为国内高放射性水平核设施退役探明了方向。
参考文献
[1] 宋学斌,核设施退役实践[M].中国原子能出版社,2013.
[2] 宋阳.基于多传感器技术工业机器人的研究与应用 [J].电子技术与软件工程,2022(6):78-81.
[3] 钱雪平,潘宇洁,赵亚娟,张超逸.智能低倍酸洗机器人系统研究[J].冶金管理,2022(24):80-84.
[4] 何林轩,核退役场景机器人抓取关键技术研究[D].西南科技大学,2022.DOI:10.27415/d.cnki.gxngc.2022.000181.
通讯作者:孙婷婷(1995-),女,黑龙江省哈尔滨市,工程师,研究生,环境科学与工程

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



