新疆昌吉特变能源有限责任公司 新疆 乌鲁木齐 830000
摘 要:本文通过在锅炉负压自动控制系统中嵌入风机出力平衡模块,解决风机运行过程因动叶线性偏差大引起的抢风现象。该模型不依赖设备的实际线性曲线,具有调整简单、实时修正并列风机出力的功能,对锅炉压力控制回路优化与运行具有重要意义。
关键词:自动化控制、锅炉压力控制、并列运行、线性、轴流风机、电流偏差
引言
1
现代人民生产生活离不开电能,火电以稳定、可靠、易控的优势在我国能源系统占据重要地位。所有的火电锅炉在运行中都要考虑到负压控制。当前的负压自动控制系统一般都是常规PID单回路调节系统,它的优点就是结构简单,但是缺点比较多如:模型依赖性比较高,模型不易确定,无法克服设备线性问题,干扰因素较多,负荷适应性不强等。
一、某大型锅炉负压自动控制介绍
某大型锅炉控制系统采用的是上海新华控制技术(集团)有限责任公司的集散控制系统OnXDC2.1软件系统是目前比较成熟的协调控制系统。
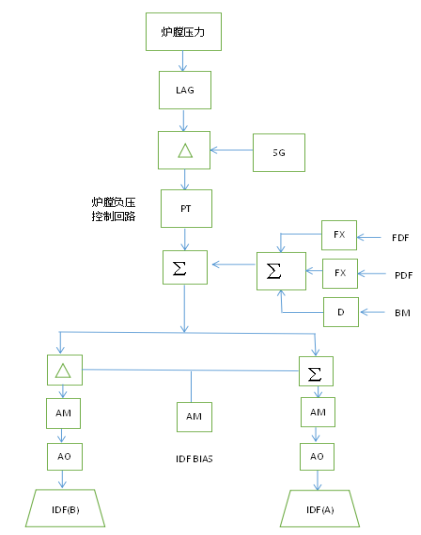
炉膛负压自动控制系统其结构是一个双执行机构单回路调节系统,主要调节量为炉膛压力,经过一个LAG模块处理炉膛压力信号,再和设定值进行一个偏差计算输出到炉膛压力控制回路PI模块进行计算产生一个动叶指令,同时包含一、二次风机出力,锅炉主燃料量的前馈与炉膛压力控制回路PI模块产生的动叶指令进行求和得到引风机动叶综合指令。偏置模块输出偏置量与引风机动叶综合指令结合分配到各引风机控制器,最终通过控制两台引风机动叶控制炉膛负压。如图1

二、某大型锅炉炉膛压力控制回路存在的问题
2018年01月17日某厂大型燃煤锅炉两台引风机并列自动运行,尾部烟道积灰较多,乙炔吹灰时尾部烟道瞬时受阻,在动叶开大过程中,两台风机一台过负荷,一台负荷突降至空载,总引风量瞬间降低,炉膛压力高导致锅炉跳闸保护条件触发停炉。
三、并列运行风机出现抢风现象的原因
造成并列运行风机失速抢风原理上就是工作点进入了实际失速曲线内,主要原因有以下几点:
(一)检修时在调整动叶安装角度初始位置、最终位置调试不够精确。
(二)电动执行机构通过连杆、梅花垫与控制轴相连,在运行过程中因长期振动、摩擦可能会出现空档;反馈机构、油缸和动叶传动机构安装、运行中也出现空档,这些都会影响到风机运行的线性。[1]
(三)风机安装时存在差异。各级叶片实际形状、安装角度不一致,运行中部分叶片漂移先发生失速现象。[2]
(四)运行中引风机叶片因所处工作环境恶劣,部分叶片磨损或者损坏等都会对风机自身运行曲线造成影响。
(五)两台风机进出口管道特性偏差,造成易失速风机管道阻力系数较大,比如进出口门有节流,尾部烟道挡板开度不一致,烟道堵灰情况等
四、炉膛压力自动控制回路策略修正
为防止抢风现象发生,在锅炉负压控制回路嵌入引风机出力平衡模块。
该模块设计的主要控制策略是:将引入两台引风机电流求偏差,通过对偏差电流进行PI计算输出引风机动叶一个微调值,将此值与原引风机偏置求和生成一个新偏置指令调节两台引风机出力差,从根本上解决并列运行引风机因线性不一致出现抢风现象。需要考虑解决的问题有以下几点:
(一)引风机电流量作为热工模拟量输入的可行性
虽然经过交直流转变后DCS采集的引风机电机4-20mA电流有效值直流信号与热工信号并没有本质区别但新增模块采用电流量作为热工模拟量输入往往因为电流量来自电流互感器,不易核对准确性且易出现阶跃性波动最终导致可靠性差,不能作为模拟量输入信号。但本文中引入的两个电流量是用于求偏差的,基于相似原理,对两台型号一致的电动机、原动机、电流互感器来说,相同出力的引风机电流不会偏差太大。
(二)动叶可调轴流风机并列运行自动平衡回路模块设计
该平衡模块加在原偏置控制器之后,它与原偏置控制器串联在一起,均单独设有相互切换和跟踪功能。它们的运行都建立在两台风机动叶全部投入自动上的基础之上,任意一台引风机未自动,控制该平衡模块和偏置控制器均不输出偏置参与两台风机出力调整。
首先仍然要考虑引风机电流可能的不稳定性,防止制动控制误动作,可以增加引风机电流测点为两个,加入电流测点品质判断,消除坏点影响,对电流进行滞后处理和平滑滤波,保证模电流拟量输入平稳度,在引入偏差计算前对数值进行限幅处理,设置输入有效值为电机空载电流到额定出力10%,防止因电流模拟量信号故障出现超调。
然后引入两台风机电流做偏差,通过限制电流差,将电流差输入PI模块经过计算生成一个实时微调偏置,此偏置与原来手动偏置控制器输出求和后分配到两个引风机控制器,通过实时微调两台并列运行风机动叶偏差来保证两台风机出力一致,避免抢风现象发生。
为防止风机偏置出力频繁调整,可在PI模块设置电流调整死区,将两台风机电流差限制在一个比较宽的经验值范围,根据实际试验得到只要不出现抢风现象然后留有余量即可,如(-10,+10)A。
考虑到事故情况下,任一台风机电流低于某一阀值(停机电流或电机空载电流),将闭锁偏差输出,风机自动跳手动,防止事故情况下风机自动误调整。
对平衡回路PI输出偏置与原偏置指令控制器求和得到的最终偏置指令输出再次设置高低限,不仅约束故障电流对风机出力平衡的破坏还能避免操作者误输指令和调试者更改参数异常对并列风机平衡运行的影响。
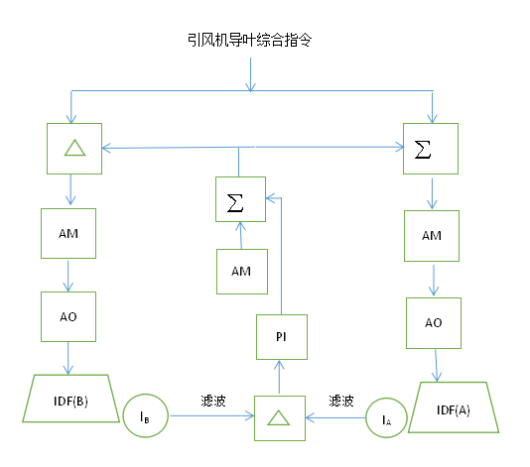
并列运行风机初状态动叶线性不一致运行危害性要远小于终态不一致,因为终态系统阻力更大,动叶迎角更大,工作点更靠近失速线,更易出现失速的现象。为应对动叶终端不一致现象,保证两台风机的调整效果,在电流不超情况下限制两台风机最大动叶调整指令不超105%某一时间,即电流不超情况时允许该引风机将动叶指令超过5%,即设定值允许(0%~105%),并且超正常值(0-100%)时给予声光报警提示。
以下是设计后的逻辑原理图:如图2

(三)自动平衡回路模块调节特性的验证
将自动平衡回路模块嵌入本厂仿真机新华DCS组态控制软件中,利用仿真软件检测平衡回路工作情况。由于仿真软件无法准确模拟并列风机失速现象,故将两台引风机手动调节至偏差电流超过死区但不超出最终指令上下限的时候,再投入两台引风机自动,检查验证两台风机最终动叶动作和电流偏差情况符合预期。将两台风机电流偏差调至死区以下,投入自动检查动叶偏差无变化,在设定炉膛负压后观察动叶偏差和电流偏差情况最终验证整个控制回路动作符合预期。
结 论
本文分析了轴流风机失速的原因,提出在控制回路中加入风机出力平衡模块,利用电流偏差比对并列运行风机进行时时微调,从而保证在全行程范围内两台风机不发生较大出力偏差,有效的避免了因线性偏差造成的风机抢风现象,对炉膛压力平稳定予以较好的保证,但是在具体参数设置上还要根据实际情况确定。
参考文献
1

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号