青岛理工大学(临沂) 山东省临沂市 273400
通过对上肢康复机器人的研究设计,可以有效帮助早年上肢受伤及时作康复训练的人群,该康复机器能够节省大部分劳动力且能够替代康复医师进行人工重复训练,改善患者运动功能并实现受损神经组织重塑,缓解了患者的生理和心理病痛,减轻家庭与社会负担,逐渐成为治疗卒中等神经损伤疾病的重要工具。
一、研究现背景及意义
康复机器人相关技术研究兴起于上世纪中后期,目前国外已研发出覆盖神经及骨科疾病的上肢康复设备,技术相对成熟可靠,市场占有率高,且机器人的临床医疗效果已得到临床康复医学支撑。我国在智能康复领域起步较晚,尽管当前已有数量可观的科研院所及企业参与到康复器械的研制之中,但在驱动关节、人机协同控制与人工智能融合等方面都有待进一步挖掘,且通过医疗器械资质及参与临床试验应用的设备也相对较少。
国家工信部印发《医疗装备产业发展规划(2021-2025 年)》,提出研发融合临床逻辑、传感测控技术与人工智能在内的医疗保健器械,开发包含机器人与协同控制等关键高新技术的康复服务器具与护理服务器具。近年来各级政府也陆续出台了医疗健康的相关政策,《“健康中国2030”规划纲要》、《关于促进机器人产业健康发展的通知》、《关于促进“互联网+医疗健康发”展的意见等指出要大力推进医疗器械辅助机器人等服务类型高端智能设备。国家十分重视高端医疗器械的进口替代技术,这些都是对于本项目研发的康复训练设备与技术推广的政策利好。
通过对上肢康复机器人的研究设计,对患者患肢进行康复训练,尽可能地使肢体失能病人运动功能恢复至正常水平,缓解患者的生理和心理病痛,减轻家庭与社会负担,增加社会健康福祉, 在个人、家庭、社会层面都是有很大意义的。
二.研究内容
1.人体上肢运动机理与等效模型建立
上肢参与了人类日常生活的绝大多数活动,是人体最为复杂灵活的组成部分。
上肢康复机器人的机构研发与人体上肢生理结构间的关系密不可分,通过分析人体上肢的解剖结构与运动机理,为机器人的进一步研究作理论基础和科学依据,增加机构设计的可行性与可靠性。
2.上肢等效机构简化模型
基于对上肢各关节生理结构的运动机理分析,可将人体肩关节的盂肱关节等效为球副 S GH ,腕关节及腕关节分别等效为 2 自由度的虎克铰形式 U E 、 U W ,如图1所示。

图1 人体上肢等效模型
由于球副及虎克铰的加工效率较低且对应成本较高,在此将上肢等效模型作进一步简化。将肩关节盂肱关节处的球副简化为 3 个转动轴线相交的 3R 机构,形成肩关节盂肱关节3自由度转动,肘关节及前臂处的复合运动采用相正交的 2R 机构进行代替,同时,考虑机械臂的紧凑布置及整体重量控制,在腕关节处保留单自由度的 1R 形式。
根据以上构型分析,所简化得的上肢等效机构模型共有6个主动自由度,如图2所示,其中肩关节具有3个主动自由度,关节转轴R1控制肩关节的内收/外展运动,关节转轴R2控制肩关节的内旋/外旋运动,关节转轴 R 3 控制肩关节的前屈/后伸运动,关节转轴R1、R2、R3组成球副关节,汇交点与盂肱关节相重合;肘关节处有2个主动自由度,关节转轴R4实现肘关节的屈曲/伸展运动,关节转轴R 5前移至手部,控制前臂的旋前/旋后运动;腕关节处有1个主动自由度,对应地,关节转轴R6 控制手腕的掌屈/背屈运动。被动平移自由度P1 、P2、P3分别实现肩宽、大臂及前臂的长度调节,以适应不同体态患者的需求。

图2 上肢等效机构简化模型
3.上肢康复机器人机械机构总体设计
机械结构的整体设计如图3所示:
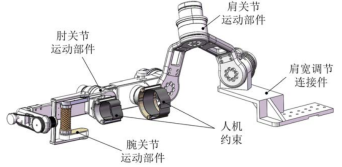
图3 机构整体设计
(1)肩关节部件结构设计
肩关节部件包含肩关节驱动模块、大臂调长组件、以及大臂约束组件,如图7所示,其中,肩关节驱动组件对应人体肩关节的主运动,3个驱动模块之间通过2个转接架实现连接与相对转动,3条轴线之间的夹角互呈60°,确保转动轴线汇交于一点,与肩关节盂肱关节相重合,驱动模块1的基座与机架间的安装角度为30°,避免大幅度运动过程中与人体头部的接触干涉。
(2)肘关节部件结构设计
肘关节部件包含肘关节驱动模块、前臂调长组件、以及前臂约束组件等,肘关节驱动模块固定于大臂下支架上,输出端连接前臂支架,实现肘关节的屈曲/伸展运动。前臂调长组件通过安装在梯形丝杠两端的直线轴承实现前臂支架和腕关节固定端之间的相对移动,从而适应不同体态患者的前臂长度。梯形丝杠一端通过滚动轴承与腕关节固定端相连,通过转动手调轮调节前臂支架和腕关节固定端间的相对距离,另一端与位移传感器相连,可反映与记录前臂长度调节信息。
前臂约束组件处设置了2个被动自由度,实现人机关节运动轴线自动匹配,改善穿戴舒适性,如图11所示。通过设置2 个滚针轴承,将前臂半环固定在旋转连接板的环形轨道上,构成被动转动副,同时,连接板内的压簧保持架和压簧固定环对前臂半环的旋转运动进行限位,并使转动具备一定柔性。同样地,在前臂半环两侧安装有直线滑轨和滑块,滑块两端设置压簧,绑带固定于滑块上,构成被动转动副。对应地,在前臂固定端内设置有三维力传感器,对前臂运动过程中产生的人机交互力进行采集和解算。
(3)腕关节部件结构设计
腕关节部件包含腕部运动组件及前臂运动组件两部分,握把两端采用双侧固定的方式,为减小腕关节的空间占用,将腕关节驱动电机隐藏于握把管套中,电机输出轴所在侧通过与同腕关节下固定架转动轴固联的同步带轮将动力输出,进而驱动腕关节完成掌屈/背屈运动。腕关节下固定架上加工有限位槽,对应腕关节同步带轮上固定有限位螺钉,实现腕关节运动限位。在腕关节上固定架的叉臂之间设置有拉压力传感器,可对腕部运动过程中产生的人机交互力进行采集和解算。在腕关节转动架两侧装有保护壳,保护壳平面贴有橡胶层,提高患者腕部及手部抓握的安全性与舒适性。
三、结论
本文首先通过对人体上肢运动机理与结构分析,得到了上肢等效机构简化模 型。然后结合上肢康复机器人的功能需求及设计要点,设计了一款六自由度串联上肢康复机械臂,为上肢受伤及时作康复训练的人群提供了帮助。
参考文献:
[]1毛伟. 具有多种康复策略的外骨骼式康复机器人控制系统设计[D].武汉: 华中科技大学硕士学位论文,2019: 41-42.
[2]易金花 简卓,王道雨,等.上肢康复机器人 [P]. 上海: 2018-05-15.
[3]邢金秋,都吉良,黄日新,等.上肢训练与评估设备[P]. 广东省: 2021-07-02.
[4] 何永正,肖亚松,张超凡,等.集评估测试和主被动训练的上肢康复训练器[P]. 河南省:2021-11-30.
[5] 张雷雨,李剑锋,刘钧辉,等.上肢康复外骨骼的设计与人机相容性分析[J]. 机械工程学报,2018,54(05):19-28.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



