重庆电子工程职业学院
摘要:针对库卡机器人外部自动运行,分析了外部自动运行PLC程序设计的思路以及要考虑和注意的一些问题,另外针对库卡机器人cell程序,分析了cell程序的结构以及如何将自己的程序添加到cell程序中。特别强调了库卡机器人外部自动运行,机器人伺服上电需要严格按照时序的要求编写控制程序。
关键词:外部、自动运行、库卡机器人、设计
1、安全门程序设计
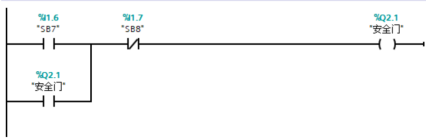
库卡机器人外部自动运行中,要启动机器人运行前,需要将安全门关闭,保证运行过程中的安全性,不会出现伤及到人身安全的事故。为此在上机控制器PLC中程序设计中,采用如下图的设计,使用启保停的设计方法,设置两个按钮,按钮SB7用于关闭安全门,按钮SB8用于打开安全门(注意这里的程序设计是用两个按钮模拟安全门的控制,实际的控制中会有区别,实际安全门的控制可以通过安全门上安装传感器来检测安全门的开闭)。此设计中,机器人周边没有安全围栏,故采用按钮来模拟安全门的开闭。如果机器人启动运行前,安全门未关闭,机器人会出现报警,机器人无法正常运行。程序设计如下图:
2、外部急停及运行开通程序设计
机器人除了示教器上的急停按钮之外,在机器人外部自动运行中,通常会设置外部急停按钮,机器人在运行中万一出现紧急事故,也可以通过外部急停来停止机器人的运行。设中通过急停按钮来控制外部急停信号。设计中,外部急停信号通过PLC的Q2.0发信号给机器人控制器,因为急停按钮使用的是常闭触头,所以当急停按钮没有拍下时,I1.0输入继电得电,所以I1.0常开触头闭合,Q2.0输出继电得电,当外部急停按钮拍下时,常闭触头断开,输入继电I1.0掉电,所以Q2.0变成off状态,这时相当于给机器人控制器发送了外部急停信号,机器人会停止运行。如果上级控制器没有对外部急停的设计,机器人无法运行,会报外部急停的故障,只有故障消除掉后,机器人才可以正常运行。
当上级控制器PLC打到运行状态时,就必须通过PLC发出运行开通的信号给机器人,机器人在运行过程中始终运行开通的信号为on,设计中PLC输出的运行开通信号是Q17.2,这个输出的信号和库卡机器人的输入信号存在着对应关系,前提条件是做好了workvisual的配置和博图软件的正确组态,如果信号的对用关系错误,会导致无法正常运行,在设计这部分之前,应先搞清楚信号的对应关系。
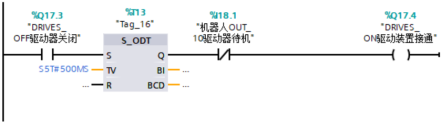
当机器人运行开通信号为on之后,等待500ms之后,接通库卡机器人的驱动器关闭信号,指令使用的是PLC的接通延时指令,这里的500ms是根据库卡机器人的时序要求来设置的,机器人需要外部启动,需要按严格的时序来编写程序。M114.1是通过profinet通信,上一个站发送过来的单元启动信号。

3、机器人伺服上电程序设计
按照机器人外部启动的时序,驱动器关闭信号得电后,延时500ms,驱动装置接通信号为on,当库卡机器人伺服上电后,会反馈信号给上级控制器PLC,这个信号通过PLC的I18.1来接收这个信号,当PLC接收到伺服启动的信号之后,就断掉驱动装置的接通信号,这里断掉伺服装置接通的信号并不是断掉机器人的伺服信号,正常运行的情况下,运行到这一步,机器人应该正常上伺服,就可以运行机器人程序了。
4、外部运行启动cell程序设计
当机器人反馈回驱动装置装置就绪信号后,通过profinet 通信,这个信号会传送到PLC的输入端,此设计中输入端对应是I18.1,当I18.1为on时代表驱动装置就绪,延时1秒,延时到会将接口激活以及使程序启动信号为on,正常情况下库卡机器人会启动cell程序并运行cell程序。

5、cell程序设计
cell程序是库卡机器人的自带的程序,库卡机器人在外部自动运行中,必须用到cell程序,cell程序相当于是入口程序,所以自己编写的程序要保证在cell程序中被调用,否则在外部自动运行中,自己编写的程序将不会被执行。Cell程序已经编写了基本的框架,自己编写的程序可以放在在这框架中合适的位置,一般不建议删除cell程序中的语句,不需要用到框架中的语句,可以用分号注释掉,cell程序前面执行的主要是初始化部分,初始化中会检测机器人有没有回到原点位置,检测到机器人回到原点位置后,才能继续往下执行,接下来主体是一个loop、endloop的结构,这个结构在库卡机器人中是一个无条件的循环结构,会周而复始的执行,在这个结构里面又有一个switch、endswitch结构,这个分支结构是根据传送过来的程序号,根据不同的程序号,跳转到不同的分支,去执行每个分支中不同的程序,当然并不是外部自动运行一定要发送程序号,要启动外部自动运行,也可以不发送程序号,因为只要外部自动运行程序启动了,必定会执行cell程序,只需要自己编写的程序放在loop、endloop的结构里边就可以了,这个时候可以用分号把switch、endswitch结构屏蔽掉就可以了。
执行库卡机器人外部自动运行中,机器人上伺服并不需要按示教器上的使能,只要严格按照外部运行的时序编写上位机的程序,就可以启动库卡机器人的cell程序,但是执行外部自动运行前,需要先切换到T1模式,通过T1模式操作机器人回到home点,当机器人回到home点之后,示教器就不需要做任何的操作,当外部启动信号接收到后,机器人就会自动自动执行cell程序。cell程序结构如下图:


客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号


