(航宇救生装备有限公司,湖北 襄阳,441000)
摘 要:火箭橇滑车运行对轨道的直线性和平顺度要求极高,主要由稳定的滑轨基础、高直线度准直基准线和光滑平顺的钢轨三个基本条件来保证和实现。为提高基准线的准确度,本文通过控制网布设及高精度水准测量,实现火箭橇滑轨水平方向和垂直方向的直线性实施精密控制,以满足高精度的火箭橇滑轨试验的需要。
关键词:火箭橇滑轨 基准线 GPS组网 一等水准测量
1 引言
火箭橇滑轨主要作为火箭弹射座椅性能检测的试验设备,经过一、二期建设,目前全长已达到6000m。同时在轨道东侧基础承台上建有139个基准点,其拟合而成基准线与轨道等长。轨道结构的横切面如图1所示。

图1 轨道结构横切面示意图
鉴于基准线受火箭橇滑轨试验等诸多因素影响,产生地基沉降、基础位移,需对基准点进行测量,以保证基准线精度达到设计要求,为轨道全线调整提供基础数据,保证滑轨精度及试验安全。
基准线沿水平方向是一空间直线;垂直方向因考虑到水刹车、地势等因素,由地球切线、过度圆弧、坡度直线组成,基准线纵剖面如图2。

图2 基准线纵剖面示意图
2基准线建线总体方案
2.1 主要工作
基准线是保证滑轨的直线性和平顺度达到规定要求的重要基础,为提高其准确性和稳定性,总体思路是:采用GPS和电子水准仪分别确定基准点的平面和垂直位置。基准线控制网由分布于基准线两侧的3个用于构建工程网的强制归心点和139个滑轨基准点共同构成,新建控制点均埋设为强制归心标石。基准线测量时,拟采用GPS静态定位技术进行平面测量;采用电子水准仪测量方式进行高程测量,按一等水准测量的精度要求施测。
基准线的建线必须严格按照作业要求进行各项观测,同时选用高精度的专用软件进行处理,使最终测量成果达到基准线所规定的精度指标。

图3 滑轨基准点构成的基准线
2.2 精度设计及技术要求
2.2.1 平面GPS测量精度设计
平面GPS控制测量参照全球定位系统测量规范中的精度要求,并根据基准线建线技术要求及现有基准线测量成果,对观测时间及观测时段进行调整,具体精度指标如表1:
表1 基准线平面测量精度指标
测量等级 | 相邻点基线分量中误差 | 相对中误差 | |
水平分量(mm) | 垂直分量(mm) | ||
1 | 5 | 10 | 1x10-6 |
2.2.2水准测量精度要求
高程控制测量按《国家一、二等水准测量规范》中一等水准精度施测,精度指标如表2:
表2 基准线高程测量精度指标
测量等级 | 偶然中误差M△(mm) | 全中误差MW(mm) |
一等 | 0.45 | 1.0 |
2.3 技术要求
(1)基准线纵向长度的相对精度优于1×![]() ,相邻基准点间距的长度误差不大于±0.5mm。
,相邻基准点间距的长度误差不大于±0.5mm。
(2)基准点水平方向相对偏差小于3mm,取水平方向坐标中误差允许值为±1.5mm,相邻基准点水平方向偏差跳跃不宜不超0.2mm。
(3)基准点垂直方向,采用一等精密水准测量,每公里水准测量的偶然中误差≤0.45mm。基准点高程测量以![]() 基准点为零高程。
基准点为零高程。
2.4坐标系统与高程系统
按照控制网测量的原则,测量采用与轨道建设时基准线一致的坐标和高程系统。
(1)坐标系统:采用基准线独立坐标系作为本次精密工程的平面基准。规定基准线由北向南为坐标纵(X)轴正向;与X轴相垂直的方向为坐标横(Y)轴,由东向西为Y轴正向。
(2)高程系统:采用本基准线专用的独立高程基准。在地球切线与过度弧线的交点处设置一个基准点,作为高程的起算点。因其控制点编号为![]() ,即有
,即有![]() =0.00mm。
=0.00mm。
3.基准线空间位置测量
3.1 基准线精密平面测量
3.1.1 网形设计
基准点位于一条直线上,且相邻基线点间距离极短(最短边仅15m)、基准点水平精度要求高,为了增强GPS网的图形结构,提高观测精度,于基准线东西两侧共设有三个控制点XF02、XF03、XF04,以及139个基准点共同构成GPS工程网,其中XF03与4个IGS国际跟踪站联测,组成框架网,引进高精度的三维平差起算基准,如图4。

图4 GPS测量组网示意图
3.1.2 标石埋设
测量精度要求高,测量周期长,新增控制点采用现场浇灌混凝土方式进行埋设,埋设深度深于冻土层。为减少仪器对中误差对测量精度的影响,采用强制归心装置,如图5。
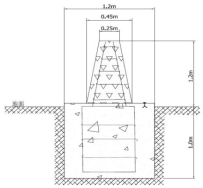
图5控制点结构示意图
3.1.3 观测方法
(1)观测流程
GPS观测分为两个步骤进行,首先进行框架网的测量,通过与分布于武汉、昆明、北京、上海的四个国际跟踪站的同步观测,计算XF03的高精度三维坐标。然后进行工程网的测量,GPS工程网采用三角形或大地四边形构网,GPS 同步图形之间的连接采用网联形式。GPS观测利用8台Trimble R8、2 台Trimble R7双频GPS接收机采用静态测量模式同步观测,对基准线的平面位置进行精密观测。
(2)观测技术指标
GPS观测的技术指标按表3的要求执行。在作业中,注意检校对中设备,保证对中准确,在测前、测后测定天线高并取两次平均值,如图6
表3GPS测量技术指标
序号 | 项目 | 框架网参数 | 工程网参数 |
1 | 卫星高度 | 10° | 15° |
2 | 同时观测有效卫星数 | ≥4 | ≥4 |
3 | 有效观测卫星数 | ≥20 | ≥6 |
4 | 各点观测次数 | ≥3 | ≥4 |
5 | 时段观测长度 | ≥23h | ≥5h |
6 | 数据采样间隔 | 30s | 10s |

图6 GPS测量现场
(3)观测注意事项
GPS观测前区分框架网与工程网,分别按照技术指标设置接收机高度截止角、数据采样率、天线类型等。测量时,天线定向标志线均朝北方。在各站均已架设无误后,各站同时开机。在观测过程中,测站周围应禁止行人及车辆靠近,以免遮挡GPS信号,禁止在测站10m内使用对讲机、50m内使用电台。
3.1.4 数据处理
首先在WGS-84坐标系下进行三维无约束平差,求解各控制点在WGS-84 坐标系中的三维空间坐标;然后在基线场独立坐标系中,以基准点基线点102#至153#作为起算点,进行二维约束平差,求得各点在基线场独立坐标系中的坐标。
本GPS网一共观测142个点(139个基准点和3个控制点),同时引入4个IGS连续运行跟踪站(WUHN、KUNM、BJFS、SHAO)不少于三天的观测数据。
基线解算中,起算点(基准站)坐标的精度将影响基线的精度。起算点对基线解算的最大影响可以用下式进行表达:
![]()
式中![]() 为对基线的影响,L为基线的长度,
为对基线的影响,L为基线的长度,![]() 为起算坐标的误差,采用多台GPS定位接收机差分定位法,其精度可达2mm;基线长度6km,对基线精度影响可以控制在1mm内,大大提高测量精度。
为起算坐标的误差,采用多台GPS定位接收机差分定位法,其精度可达2mm;基线长度6km,对基线精度影响可以控制在1mm内,大大提高测量精度。
为传递GPS网三维平差起算基准,选取周边4个IGS跟踪站(WUHN、KUNM、BJFS、SHAO)。4 个IGS跟踪站与XF03点构成框架网。利用高精度GPS数据处理软件以及精密星历文件和全球广播星历文件进行基线向量的解算。
网平差的软件:采用CosaGPS V6.0版本。基准:ITRF 坐标框架下三维平差的基准站为4个IGS 站:武汉(WUHN)、昆明(KUNM)、北京(BJFS)、上海(SHAO)。在ITRF 坐标框架下,三维无约束平差的目的主要有以下三个方面:一是进行粗差分析,以发现观测量中的粗差并消除其影响;二是调整观测量的协方差分量因子,使其与实际精度相匹配;三是对框架网的内部精度进行检验和评估。
二维平差目的是将结果转换到独立坐标系。以![]() 、
、![]() 两点为起算点进行二维平差,平差后,最弱点
两点为起算点进行二维平差,平差后,最弱点![]() 的中误差为±1.3mm,平均点中误差为±0.9mm,结果均优于精度指标要求。
的中误差为±1.3mm,平均点中误差为±0.9mm,结果均优于精度指标要求。
3.2 基准线精密高程测量
基准线精密高程测量采用电子水平仪及配套条形码铟瓦水准尺按国家一等水准测量精度要求施测,且要求每公里水准测量的偶然中误差小于0.45mm,全中误差小于1mm。
3.2.1 网形设计
利用139个基准点作为水准点,组成六个水准闭合环,在每个基准点上安置特制的标准钢球,如图7。作为固定尺垫以转递高程,测量基准点标志顶面之间的相对高差。测量过程中,前后尺在基准点上始终使用同一钢球,以消除由于不同钢球制造误差对观测高差产生的误差。

图7 标准钢球
3.2.2 观测方法
由于基准线的高程精度要求高,水准测量难度大。水准测量中往、返测高差不符值限差为1.8![]() L、环闭合差限差为2
L、环闭合差限差为2![]() F(L和F为水准测量的路线和环线长度)。水准测量视线长度、视距差、视距高度技术要求见表4。
F(L和F为水准测量的路线和环线长度)。水准测量视线长度、视距差、视距高度技术要求见表4。
表4 水准测量技术要求
视线长度 | 前后视距差 | 任一站点视距差累积 | 视线高度 | 重复测量次数 |
≥4m且≤30m | ≤1m | ≤3m | ≥0.65m且≤2.8m | ≥3次 |
往、返测奇数站按“后前前后”的顺序观测,偶数站按“前后后前”的顺序观测。观测中采取适当的技术措施,提高测量精度,避免或减少返工。整条线路的往、返测使用同一台仪器和同一钢球,沿同一线路进行,如图8。

图8 高程水准测量
3.2.3数据处理与精度评定
将各测段往返测高差进行测段平差,并进行往返测高差限差及环闭合差限差的判断,各项限差均满足规范限差要求。按往返测高差不符值计算每千米水准测量的偶然中误差计算式:
![]() 式1
式1
式1中Δ为测段往返高差不符值,单位为mm;R为测段长度,单位为km;n为测段数。
以![]() 基准点为起算点,对观测高差进行严密平差,平差后,每千米水准测量的偶然中误差为±0.34mm。最弱点
基准点为起算点,对观测高差进行严密平差,平差后,每千米水准测量的偶然中误差为±0.34mm。最弱点![]() 的高程中误差为±0.53mm,均优于技术指标要求。
的高程中误差为±0.53mm,均优于技术指标要求。
4.结论
(1)GPS网布设均匀,结构合理,观测时间符合设计要求,平差后的点位中误差满足滑轨基准线设计的精度要求。
(2)一等水准测量采用最先进电子水准仪进行观测,严格按照规范要求进行操作,各种精度指标均优于技术指标要求。
(6)火箭橇滑轨对基准点的平面坐标和高程的精度要求极高,应该加强对基准点特别是填方段的检测,确保其已经达到足够稳定程度。
参考文献:
[1] 熊伟.火箭橇滑轨基准线测量技术文件,中铁大桥勘测院[J].2017(4):12-14.
[2] 刘岩.GPS测绘技术在工程测绘中的应用.冶金管理[J].2021(21):25-29.
[3] 董玉婷.轨道交通施工对地面精密导线网的影响分析
..测绘科学技术学报[J].2018(35):19-25.
作者简介:邵沛(1986-10),男,汉族,湖北襄阳人,工程师,毕业于中国地质大学,学历硕士,主要从事轨道技术研究工作。
邮寄地址:邮寄地址填 湖北省襄阳市樊城区春园东路1号左岸春天小区 邵沛 13797767532

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



