徐州市检验检测中心 江苏省 徐州市 221000
摘要:随着工业自动化和机器人技术的飞速发展,对高精度空间定位和计量的要求越来越高。基于此,本文开发一种高效的多目红外相机定位系统,采用一维标定杆和高反光小球标记点,通过多目相机捕捉反射的红外光线来精确定位。通过Matlab模拟实验和Optitrack光学系统的真实数据采集,证明系统在提高定位精度和降低噪声影响方面的有效性。
关键词:标定杆;位姿;计量
在当前的科技发展背景下,精确的空间定位和测量技术已成为多个领域的核心需求,特别是在工业自动化、机器视觉以及机器人技术等领域,高精度的定位系统对于提高生产效率、准确性和自动化水平至关重要。传统的定位系统已无法满足大空间范围和高精度需求,多目相机系统凭借其在空间感知和精确测量方面的优势,在红外光谱下,相机对环境光源的依赖更小,稳定性和精确度更高,在复杂环境下的应用优势显著。因此,为探究更为精准、可靠的空间定位计量技术方案,亟需对多目红外相机的定位系统展开深入研究。
一、多目红外相机定位系统设计
多目红外相机系统采用简易且成本低的一维标定杆进行标定和测量。标定杆上的小球作为反射相机红外光线的标记点,其在成像平面上形成近圆图案。通过边缘提取和计算中心点位置来确定标记点的像素坐标。标记点的高反光性,在灰度图像中形成鲜明的亮度对比,有助于相机精确捕捉。图像经过二值化处理,将灰度值简化为0(黑色)和255(白色)[1]。
在成像平面中,若第![]() 行
行![]() 列的像素灰度值小于60则将灰度值变为0,若大于等于60,灰度值变为255,二值化设置如下:
列的像素灰度值小于60则将灰度值变为0,若大于等于60,灰度值变为255,二值化设置如下:
 (1)
(1)
标记点的特征点为圆形,那么可以对特征点进行拟合,进而求得圆的中心点坐标即为特征点的坐标值。设圆的方程如下
![]() (2)
(2)
![]() 为球心坐标,
为球心坐标,![]() 为球半径,对于边缘点
为球半径,对于边缘点![]() 来说
来说
 (3)
(3)
其中,![]() ,构造如下目标函数
,构造如下目标函数
![]() (4)
(4)
使用一维标定物对多目相机进行标定,如图1。

图1 一维标定杆多相机成像示意图
一维标定杆在多目相机下投影关系分析,三个共线标记点为![]() 、
、![]() 、
、![]() ,记
,记![]()
![]()
![]() 为标记点在空间中的不同位置
为标记点在空间中的不同位置![]() 。
。![]() 为第
为第![]() 个相机的光心,
个相机的光心,![]() 。记
。记![]() 为不同点之间的距离,那么
为不同点之间的距离,那么![]() ,
,![]() ,
,![]() 。特征点在相机成像平面中的成像点分别为
。特征点在相机成像平面中的成像点分别为![]() ,
,![]() ,
,![]() 。
。
标定杆上三点在内、外参数![]() 、
、![]() 、
、![]() 、
、![]() 、
、![]() 、
、![]() 下的重建点为
下的重建点为![]()
![]()
![]() 。建立关于标定杆长度的函数并进行优化。记重建后的标定杆长度距离和真实距离的误差函数为
。建立关于标定杆长度的函数并进行优化。记重建后的标定杆长度距离和真实距离的误差函数为![]() ,不同长度的误差函数公式如下
,不同长度的误差函数公式如下
![]() (5)
(5)
![]() (6)
(6)
![]() (7)
(7)
将上式长度误差函数累加,得到总体误差函数,对总体误差函数进行优化。记![]() 是关于内、外的向量,构造关于的
是关于内、外的向量,构造关于的![]() 的总体误差函数
的总体误差函数
![]() (8)
(8)
假设经过估计的重建矩阵![]() 后,得到的图像点
后,得到的图像点![]() ,
,![]() 称为重投影点,将该点和观测点之间的距离最小化,如下
称为重投影点,将该点和观测点之间的距离最小化,如下
![]() (9)
(9)
函数![]() 为
为![]() 和
和![]() 的几何距离函数,该函数称为重投影误差。根据
的几何距离函数,该函数称为重投影误差。根据![]()
![]()
![]() 的共线性质,以
的共线性质,以![]() 为中心,建立球坐标系,用
为中心,建立球坐标系,用![]() 来描述
来描述![]()
![]() 的置位。那么空间点
的置位。那么空间点![]()
![]() 与
与![]() 的关系如下
的关系如下
 (10)
(10)
将式(4-10)表达式带入式(2-6),那么![]()
![]()
![]() 三点的重投影进行整体误差最小化求解,最小化重投影误差表达式如下
三点的重投影进行整体误差最小化求解,最小化重投影误差表达式如下
 (11)
(11)
此处的![]() 为包含
为包含![]() 、
、![]() 、
、![]() 、
、![]() 、
、![]() 、
、![]() 、
、![]() 、
、![]() 、
、![]() 的变量。使用稀疏LM算法进行求解。
的变量。使用稀疏LM算法进行求解。
二、多目相机实验
使用matlab软件建立标定杆空间模拟数据,相机硬件参数设置为真实相机参数:焦距5.5mm,图像分辨率1280×1024pixel。对两个相机下的重投影误差进行计算。以其中一个相机(设此相机为第0个相机)为原点,建立球坐标系,那么此相机的旋转和平移矩阵设为![]() 、
、![]() 。设另外一个相机(第一个相机)相对于第0个相机的位姿为
。设另外一个相机(第一个相机)相对于第0个相机的位姿为![]() 、
、![]() 。在第0个相机的坐标系下,建立
。在第0个相机的坐标系下,建立![]() 、
、![]() 、
、![]() 三点的空间坐标,建立模拟数据的具体过程为:
三点的空间坐标,建立模拟数据的具体过程为:
(1)首先基于第0个相机的坐标系,建立A点的位置相关参数,那么B、C点即为在球坐标参数上加上固定的距离和角度。
(2)使用sph2cart函数将三点位置变换为其在三维直角坐标系下的坐标。
(3)将直角坐标系下的坐标带入式(2-6),求解出成像坐标![]() 。
。
共建立99组模拟数据,得到的模拟标定杆数据在两个模拟相机视角下的成像图像如图2。

图2 模拟数据建立流程图

(a)左相机(b)右相机
图3 模拟标定杆位置示意图
依次叠加噪声均值为0,标准差从0加到2的噪声,间隔0.1像素。以两个相机为例,噪声等级和重投影误差关系如图4,菱形和圆形分别表示第0个相机和第1个相机的重投影误差值。虚线和实线分别表示第0个相机和第一个相机的噪声误差变化曲线。
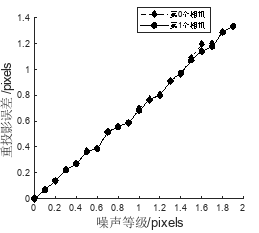
图4 噪声与重投影误差关系
两个相机的重投影误差分别从0pixels增加至1.48pixels和1.46pixels。随着噪声等级的增加,重投影误差呈线性增长趋势。当噪声的标准差为0.1pixel时,相机理论误差可达到0.1598pixels。
使用Optitrack光学系统进行标记点采集,相机型号为Prime13,相机参数与模拟相机参数一致,根据相机参数可以求出相机理论内参值,如表1。
表1 多目红外相机理论内参值
内参 |
|
|
|
|
理论值 | 178.5714 | 178.5714 | 640 | 512 |
采集2个相机、3个相机、4个相机下的多目红外系统真实像素数据,各78组数,进行参数估计与双目系统相比,一维标定算法下估计的内参值更接近理论值,内参标定的误差较小。通过增加相机数目来提高标定精度。计算2个相机、3个相机、4个相机下的多目红外系统在真实数据下的重投影误差,如表2。
表2 多目红外相机内参标定结果
内参 相机数目 |
|
|
|
| |
2 | 第0个相机 | 183.8579 | 184.1572 | 629.6578 | 507.7098 |
第1个相机 | 222.5543 | 222.8074 | 637.4922 | 503.2352 | |
均值 | 203.2010 | 203.4825 | 633.5744 | 505.4728 | |
3 | 第0个相机 | 197.9223 | 197.9103 | 641.8585 | 514.5636 |
第1个相机 | 292.7440 | 292.9279 | 636.0514 | 508.3573 | |
第2个相机 | 192.7612 | 193.0129 | 633.9388 | 512.7192 | |
均值 | 227.8095 | 227.9504 | 637.2822 | 511.8801 | |
4 | 第0个相机 | 195.5428 | 195.0172 | 640.5896 | 513.1526 |
第1个相机 | 205.3256 | 206.2441 | 645.8741 | 515.6980 | |
第2个相机 | 186.5412 | 186.4785 | 631.4516 | 506.5614 | |
第3个相机 | 191.6970 | 192.7489 | 637.3269 | 509.8416 | |
均值 | 194.7762 | 195.1225 | 638.813 | 510.3599 | |
表3 真实数据重投影误差计算结果
相机数目/个 | 相机重投影误差/pixels | 平均重投影误差/pixels |
2 | 0.1590 | 0.1598 |
0.1606 | ||
3 | 0.1334 | 0.1314 |
0.1101 | ||
0.1503 | ||
4 | 0.0870 | 0.0970 |
0.0960 | ||
0.1093 | ||
0.0961 |
三、结语
综上,本文所提出的多目红外相机定位系统的精确度和可靠性均比较高,本次研究证明一维标定杆方法在多目相机系统中的有效性,利用先进的图像处理技术和计算方法,可有效优化空间定位系统,通过增加相机数量,可显著提高系统性能的潜力,对于推动工业自动化、机器视觉和机器人技术的发展具有重要意义。
参考文献:
[1]孙波.基于多目红外相机的手术机器人光学跟踪系统相关技术研究[D].山东大学,2011.
[2]李太行.基于自监督重投影的多视红外图像深度估计与超分辨率算法研究[D].西安电子科技大学,2022.
[3]张亚昆,高全芹,孙海洋等.平面长波红外相机阵列定位误差分析与计算[J].激光与红外,2023,53(04):551-555.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



