北方自动控制技术研究所,030006
摘要:旋翼无人机的轨迹规划是指在特定约束条件下,寻找满足旋翼无人机机动性能及其他战术要求的,从起始点到目标点的最优飞行轨迹,它是旋翼无人机任务规划系统的关键技术,也是无人机实现自主飞行的技术保障。
根旋翼无人机轨迹规划约束条件,提出了采用轨迹长度和轨迹节点高度的加权作为旋翼无人机轨迹规划的评价函数,该评价函数综合考虑了飞行中的轨迹长度因素及安全性因素,并规定了旋翼飞行的最低高度,并基于以上条件实现了无人机的三维轨迹规划。
关键字:无人机,轨迹规划,信息素
随着电子、机器人和人工智能等技术领域的发展,无人机(Unmanned Aerial Vehicle,UAV)的研究正广受关注并快速发展。其中,旋翼无人机由于其动力学性能优良,备受国内外学者关注。近年来,基于地面人员实时遥控操作的微小型旋翼无人机在航拍、救援等领域发挥着不可替代的作用。自2013年旋冀无人机第一次出现在雅安抗震救灾的现场,它逐渐进入人们的视野,应用的领域也在不断扩展,军事上它被用来侦察、通信、探测、识别和监控等,民用上可以用来监控交通、检测空气质量、抗震救灾、构建地图等,它的潜力不断被发掘,应用也越来越广泛,它的研究也越来越受关注。
自主型旋翼无人机涉及多门交叉学科,对国防建设和民用服务方面都是迫切需要和值得发展的研究项目,因而极具研究价值。
旋翼无人机的轨迹规划是指在特定的约束条件下,寻找满足旋翼无人机从起始点到目标点某种规定性能指标的最优飞行轨迹[1]。规划轨迹是为了使无人机飞行的轨迹最短、时间最优,它是无人机任务规划的关键技术,也是无人机能实现自主控制和智能飞行的技术保障[2]。因此,旋翼无人机的迅猛发展和广泛应用给轨迹规划技术提出了更高的要求,也使无人机轨迹规划技术成为国内外学者研究的热点之一[3]。正因如此,本文拟展开对旋翼无人机轨迹规划的研究。
我国的无人机轨迹规划研究始于八十年代,围绕无人机的地形跟踪及威胁回避技术而展开。近些年随着研究的不断深入,我国的无人机轨迹规划研究在实用与智能方面取得了重大进展。青岛海洋大学庄晓东[4]等人将模糊概念理论模型应用于机器人的轨迹搜索中;复旦大学的罗成[5]等人研究基于遗传算法运用于无人机轨迹规划;杭州电子科技大学张波涛[6]等人将改进的人工势场法和量子遗传算法相结合应用于移动机器人的轨迹规划;西工大的焦振江[7]等人将改进的蚁群算法应用于无人机轨迹规划中。
无人机轨迹规划就是在地形、障碍物和任务时间等因素下,从起点到终点规划出一条符合无人机约束性能并且使综合性能最小的飞行轨迹。当今科技的不断进步促进着无人机技术将应用到更多领域,其轨迹规划所受的限制更多,设计难度也随之增大,因此研究设计合理的无人机轨迹更加有意义。
旋翼无人机轨迹规划是为了寻找到一条从起始点 到目标点 的最优的轨路 ,并避开所有的三维障碍物。假设从 点到 点的轨迹可以分为 段,每一段的长度为 ,总的轨迹 可以表示为:
|
考虑到上述约束条件的限制,评价旋翼无人机轨迹的优劣主要在于其飞行的轨迹总长度和飞行的高度,所以,本课题最终提出以轨迹的长度加上旋翼无人机每一个飞行节点的高度值作为适应度函数。设现有一条旋翼无人机的轨迹![]() ,旋翼无人机在飞行过程中经过节点
,旋翼无人机在飞行过程中经过节点![]() 。适应度值函数
。适应度值函数![]() 如下所示:
如下所示:
|
式中,![]() 和
和![]() 是系数,其值的大小分别表示轨迹长度和旋翼飞行高度在轨迹规划中的重要性程度,系数取值越大表示该项在轨迹规划中越重要。
是系数,其值的大小分别表示轨迹长度和旋翼飞行高度在轨迹规划中的重要性程度,系数取值越大表示该项在轨迹规划中越重要。
蚁群算法为旋翼无人机轨迹规划的步骤如下:
步骤一:三维环境建模,对空域环境进行网格划分;
步骤二:主方向选取、初始化信息素、确定起点、终点坐标、确定算法参数;
步骤三:将M只蚂蚁放起始点S处待出发;
步骤四:蚁群根据公式(3.3)由当前栅格点选择下一栅格点,如此迭代下去,最终到达目标点,得到M条轨迹,分别计算这M条轨迹的适应度值,通过比较适应度值选出最小的适应度的轨迹即为最优轨迹;
步骤五:根据公式(3.9)、(3.10)对栅格点来进行信息素的更新;
步骤六:判断是否达到迭代次数,如果达到迭代次数则完成搜索;若没有达到迭代次数,则转至步骤三继续执行,直到满足迭代条件;
步骤七:绘制旋翼无人机最优轨迹图。
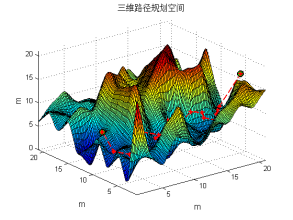
如下图所示是基于蚁群算法的无人机轨迹规划效果图:
本文首先介绍了在四旋翼无人机轨迹规划当中需要用到的技术,包括主要环境建模方法,定位技术和常用的搜索算法。根据四旋翼无人机飞行特点,提出论文适合四旋翼无人机轨迹规划的评价函数。建立了基于高程图的环境模型,并用到了三维栅格图相关知识。本文所研究的蚁群算法有效的实现了四旋翼无人机全局轨迹规划,并且该规划结果能直接应用于实际飞行。
参考文献
[1]M.P.Vecchi, S.Kirkpatrick. Global Wiring by Simulated Annealing [J]. Computer-Aided Design of Integrated Circuits and Systems, IEEE Transactions, 1983, 2(4): 215-222
.
[2]张广林,胡小梅,柴剑飞等.轨迹规划算法及其应用综述[J]. 现代机械.2011, 10(05):51~55.
[3]聂博文. 微小型四旋翼无人直升机建模及控制方法研究[D]. 硕士学位论文.湖南:国防科学技术大学, 2006.
[4]庄晓东,孟庆春,殷波等.动态环境中基于模糊概念的机器人轨迹搜索法[J]. 机器人, 2001, 23(5): 397-399,458.
[5]罗诚, 崔升. 基于遗传算法的无人机轨迹规划[J]. 复旦学报, 2011,5 0(6): 792-796.
[6]张波涛, 刘士荣. 基于Q-GA的人工势场的移动机器人轨迹规划[J]. 控制工程,2008, 15(4): 451-455.
[7]焦振江, 王正平. 基于改进蚁群算法的无人机轨迹规划[J]. 航空计算技术, 2006, 36(4): 112-114。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



