1中核坤华能源发展有限公司 浙江 杭州 311113 2&3&4中核汇能安徽新能源有限公司 安徽 合肥 230031
摘要:本文结合对当前太阳能发电技术现状的研究,并从理论上分析了太阳能跟踪控制策略的先进性与可行性。进一步对太阳能能跟踪技术中关键核心技术的深入研究,提出了混合跟踪控制方式的技术路线。通过示范项目的发电量效率与固定可调支架的发电效率进行了不同维度的比对,确定了本科研项目的发电效率的明显优势。
关键词:太阳能;时控跟踪;光控跟踪;双轴跟踪
引言
太阳能以绿色环保、资源丰富、不受地域限制且获取容易的优势,成为了新能源领域的新宠而被广大科研组织或个人列入热门科研课题,但因能量密度小,转换效率不理想,以致在推广应用中依然进展缓慢。提高太阳能发电的效率,一直以来被列为科技攻关的重大难题。
1 太阳能跟踪控制策略及执行机构的研究
1.1 太阳能跟踪技术的发展趋势
由于不同的季节、不同的时刻,太阳的高度角和方位角都在时刻变化。对于固定安装角度的支架来说,大多数时刻太阳光与光伏组件太阳能接收面存在较大角度偏差,致使光伏发电系统发电效率达不到最佳的状态。自动跟踪技术就是将光伏组件的法线时刻对准太阳,使太阳光线与接收面法线重合,以增大光伏组件的有效接收面积,从而提高组件的发电效率。
1.2 太阳能自动跟踪技术的应用
太阳能自动跟踪技术,主要分为视日轨迹跟踪和光电跟踪两类,也是当前太阳能自动跟踪技术的研究热点。总体思路均是为了让太阳光线与组件面法线随时保持最大限度的重合。
1.3 时控跟踪方式
利用当地影响地理的纬度参数、影响时间的经度参数以及影响太阳位置时刻参数信息为依据,计算出当地的日出时间、日落时间以及太阳在任意时刻的实时位置,以此信息为基准,从方向角和俯仰角的方向,通过步进电机转动光伏板到相应的角度,使得光伏组件接收面的法线对准太阳。
1.3.1 时控理论基础
参考如图-1所示的地平坐标系统,以此作为太阳方位的仿真计算模型的基础体系。
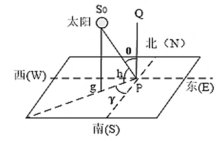
图-1: 地平坐标系
天顶角𝜃= 90°-ℎ (2-1)
太阳赤纬角δ= 23.45 sin(360 ×(284+n)/365)(2-2)
太阳时控角ω=(t-12) ×15 (2-3)
高度角ℎ :sin ℎ = cos 𝜃= sin 𝜑sin 𝛿+ cos 𝜑cos 𝛿cos 𝜔 (2-4)
方位角γ:sin𝛾= cos𝛿sin 𝜔/ cos ℎ (2-5)
𝜔1,2 = ± cos-l(− tan 𝜑tan 𝛿) (2-6)
日出时间:tc=12-ω1/15;日落时间:tI=12-ω2/15。
1.4 时控跟踪控制方法
时控跟踪因其控制角度完全依赖理论计算,将随着时间的积累误差逐渐增大,属于开环控制原理,不能得到及时修正,在系统投运初期跟踪精度高,后期跟踪精度将无限扩大而失去跟踪的意义。其控制原理如图-2所示:
![]()
图-2:时控跟踪模式开环控制原理图
1.5 光电跟踪方式
光电跟踪的基本思路就是由光电传感器测定太阳的实时位置,然后将太阳光线与光伏组件的法线对比得出角度偏差值,通过跟踪执行机构最大限度地调节角度偏差值到最小,使光伏板面与太阳光线理论上保持垂直。
1.5.1 光电跟踪原理
由光敏元件作为信息采集元件,感知外界光照环境信息,将信息的变化结果进行处理,将处理结果作为比较电路的输入信号进入核心控制器,对此信号完成处理后作为跟踪控制信号源来实施太阳光的跟踪。利用传感器的固有特性:光照发生改变时会输出不同信号,依据变化的信号就能定位光源(太阳)的方向。而跟踪则是通过对应的控制信号对配套跟踪执行机构进行精确的调节,便实现了光源的跟踪。
1.5.2 光电跟踪控制方法
光电跟踪控制方法的优缺点可以概括为:①优点:跟踪精度高,组件的空间角度调节高效,属于闭环控制,对太阳位置变化敏感。②缺点:因为对光照环境的要求较高,以致阴雨天气容易误动作,也就是说无法应对恶劣的天气状况。控制原理如图-3所示:

图-3:光控跟踪模式原理图
1.6 混合跟踪控制方式
时控跟踪方式和光控跟踪方式在应用中存在各自明显的优缺点,为了弥补这种性能上的不足,充分发挥光伏跟踪的优势,本研究提出了混合跟踪控制方法,即光控+时控的跟踪控制模式,以光照强度作为基本切换条件,一方面充分运用各自太阳跟踪优势,另一方面对两者在对太阳跟踪定位上的不足形成互补。
在没有其它环境因素影响下,只要检测到光照强度高于某个阈值就启动光控模式。一旦太阳射入路线被遮挡时切换为时控模式,继续对太阳运动轨迹进行程序时控跟踪,直到入射光线强度恢复,控制系统再次启动光控跟踪模式。当光照强度低于最低点的阈值不足以提供系统运行时,系统主动进入休眠模式。为了达到更好的跟踪效果,综合各方面的因素,采用时控与光控互相切换的混合跟踪控制方案。
1.7 支架距离与控制的研究
鉴于双轴跟踪支架的实际安装区域不是独立的,而是分遍集中安装的,因此,必须考虑双轴跟踪过程中组件的相互遮挡,结合组件的规格尺寸确定支架的尺寸及相互之间的距离,前后排距离D的确认原则为:冬至当天的9:00至下午3:00,太阳能方阵不应被遮挡。
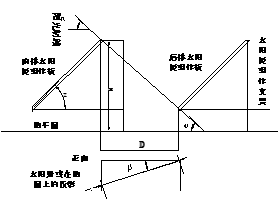
图-4:太阳组件布置陈列间距计算参考图
参考图-4太阳能组件阵列间距离计算参考图可得方程式(2-7):
![]()
![]()
![]()
![]() (2-7)
(2-7)
冬至时纬度角δ是-23.45°,9:00时角ω是45°,φ为安装地区的实际纬度角。
1.8 电控系统设计
跟踪控制可以采用连续跟踪和步进跟踪两种基本方式、三种模式,两自动一手动:①GPS定位跟踪;②追光跟踪;③手动调节模式。为了适应执行机构的灵活选型,根据实践及理论建模,其降低量不超过2%-5%,而且步进式步幅越小,降低量就越低,越接近连续跟踪方式。综合各方面考虑,本产品基于GPS建模,通过软件建模,采用步进跟踪方式,使其跟踪角度误差小于±0.5度。
项目 | 双轴跟踪智能支架 | 双轴跟踪智能支架 | 固定可调支架 | 备注 | ||||
实际组件容量 | 示范1:145.92 kw | 示范2:125.8kw | 样本:111kw | |||||
日发电量 | 合发电量 | 单W发电量 | 合发电量 | 单W发电量 | 合发电量 | 单W发电量 | ||
1210 | 19.67 | 0.13 | 17.50 | 0.14 | 11.99 | 0.11 | ||
1211 | 33.73 | 0.23 | 29.52 | 0.23 | 20.98 | 0.19 | ||
1212 | 89.45 | 0.61 | 74.17 | 0.59 | 52.25 | 0.47 | ||
1213 | 62.04 | 0.43 | 50.06 | 0.4 | 34.77 | 0.31 | ||
1214 | 38.52 | 0.26 | 32.79 | 0.26 | 22.72 | 0.2 | ||
1215 | 82.33 | 0.56 | 66.16 | 0.53 | 46.67 | 0.42 | ||
总发电量 | 325.74 | 2.22 | 270.2 | 2.15 | 189.38 | 1.7 | ||
6天均值比较效率提升(%) | 30.58 | 26.47 | ||||||
2 示范项目的研究与跟踪测试
本文针对太阳能光伏发电中所存在的发电效率不足的问题进行了重点探讨,通过理论研究和分析,基于现有设备技术,研发出了一种优化的控制策略,并设计了一款基于四象限探测器的光电检测传感器。在示范过程中,验证了时控+光控混合控制的跟踪控制策略的可行性,并对所设计的双轴跟踪智能支架系统示范过程中发电效率的提升效果与电站原有同位置的可调支架进行了比对。
示范项目通过对两种组件、两种支架组成的三种模式下的逆变器的的发电量进行比较分析,从而开发出一种经济性最佳的组件搭配支架的高效模式。以2023.12.10~12.15六天的实际发电量为例,进行对比分析各种支架和组件的发电效率比对结果。发电量单位为:KWh
3 结语
太阳能双轴跟踪系统是当前研究热点,其最终目的都是为了增加太阳能的利用率,本文设计的一种基于四象限光电探测器的双轴太阳跟踪方法,采用时控+光控的跟踪控制策略,智能适应各种气象的多模控制条件。最后通过示范项目的比对,验证了本研究的实用性与经济性,为光伏电站的提质增效,提供了重要的专项设计和核心能力,示范项目的发电量比对结论:实验数据为与可调支架比较,发电效率提升量为25%,与当前流行的固定支架比较,发电效率可提升量可达30%以上。
参考文献:
周诗悦,朱凯,刘爽.太阳能电池板自动跟踪系统[J].控制工程,2009, 16(增刊):17-19.
Clifford.Eastwood. Design of a novel passive solar tracker [J].So-lar,2004,296-280.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号