内蒙古一机集团宏远电器股份有限公司
摘要:码垛机是一种将传动带上的物品进行搬运,并放置在托盘上进行码垛的机器。人们对于物流的需求量在逐渐增大,人工码垛已经在一定程度上出现了人力不足的情况,在码垛期间出现大量的问题,而大型码垛机对于小型物流产品,显得过于庞大,出现资源浪费。本文主要对码垛机传动机构和执行机构进行了设计,使其更加小巧精确,成本更加的低廉,普及度更高。
关键词:码垛机;结构框架;传动效率
一.引言
码垛机分为很多种类,有直角坐标码垛机,全关节架构码垛机,平行四边形架构码垛机和直线水平多关节码垛机。直角坐标码垛机也称桁架码垛机或龙门式码垛机,是以XYZ直角坐标系统为基本数学模型,以伺服电机、步进电机为驱动的单轴机械臂为议题,进行作业。其可以完成在XYZ直角坐标系中任意一点的位置到达和运动轨迹模型的计算。全关节架构码垛机具有四个能运动的关节,即四个运动的自由度,四个运动关节,其适用性非常强,适用领域也非常广泛,包括纸箱、塑料箱、瓶类、袋类、桶装、膜包产品及灌装产品的码垛。
本文主要对码垛机传动机构和执行机构进行设计,具体设计内容如下:
1.完成总体轮廓的设计;
2.完成零件传动系统和执行系统的设计;
二.总体轮廓设计
码垛机的基本参数有:提升重量、提升高度、水平运动行程、传递扭矩、提升速度。
码垛机在工作时候零件所承受的载荷力不尽相同,为确保码垛机的合理运行及码垛安全,要进行合理的设计布局,在保证效率的情况下不影响其美观性,同时还可以降低成本。
根据设计要求得
最大起重重量: 20kg;
最大提升高度: 240cm;
竖向水平轴最大移动距离: 84cm;
横向水平轴最大移动距离: 约为200cm,实际为198cm;
垂直手臂高度: 250cm;
水平手臂长度: 223cm;
伸出手臂长度: 100cm;
码垛方式为20排列,共三层,一层九个箱子。抓手进行一个箱子为一体进行抓取,共计时间为3分钟。
码垛机选择立柱式进行设计,立柱式码垛机可以减少占地空间,使其空间占有量小,相比较龙门式和悬臂式码垛机,立柱式码垛机的工作效率非常高,动作非常的灵活,每个方向的移动都有独立的控制系统,保证了码垛的精准性,误差非常小,其可以在三个自由度方向进行来回的移动,工作范围非常大,可以涉及到工作范围内的任意一点。
在其竖直立柱上安装一个与竖直柱子相垂直的长方形板材,并在板材质之后设置滑轨,选择用HGH系列线性滑轨,用滚珠丝杠进行传动,同时可将滑轨和固定板进行焊接。将电机放在长方形板材的一侧通过电机的正反转控制滚珠丝杠的来归移动,与此同时也在长方形板材上在设置一个伸出壁,同样伸出壁也用滚珠丝杠进行传动,滚珠丝杠的传动效率更高,可以满足码垛使时间的要求。利用电机带动滚珠丝杠进行移动,从而实现抓手在X轴水平方向的移动。
在执行机构的设计中,选择夹板式抓手,夹板式抓手可以保证抓取的力度,不会损伤物件,提高码垛的效率。夹板采用两个动板,动板之间设置滑轨,同样的滑轨型号选择也为HGH型号,并与两个夹板分别使用两个内六角圆柱头螺钉M8X40进行固定。动夹板采用气动阀进行传动,通过两个气动阀带动夹板进行开合。完成装夹搬运,依靠摩擦力进行支撑,不会在码垛途中掉落。同时在夹板与纸箱接触一侧设置橡胶,一方面是为了增加摩擦力,另一方面也可以保证纸箱的完整,不会损伤纸箱。总体设计图如图1所示。
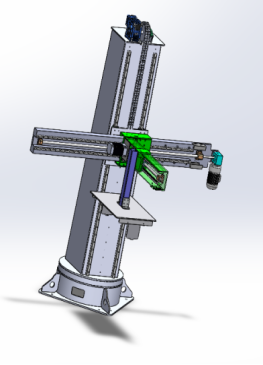
图1 总体设计图
三.传动机构及执行机构设计
对于传动方案则有两种选择,一种为齿轮齿条传动,另外一种则是滚珠丝杆传动。从传输距离上来看,齿轮齿条传动更加适合远距离传输(大约4米以上传输距离),而滚珠丝杠传动适合短距离传输。对于此码垛机而言,伸出臂的传输距离仅有两米左右,达不到远距离传输的要求,因此就传输距离而言,选择滚珠丝杠传动更加的合适。
从传输速度而言,滚珠丝杠传动传输的速度较快,齿轮齿条传动传输的速度较慢,而此码垛机则速度时间的要求,因此选择滚珠丝杠传动更加的合适。
就材料的价值而言,滚珠丝杠的价格比齿轮齿条的价格更加高。
就传输精度而言,滚珠丝杠的传输精度比齿轮齿条更高,而此文章对于码垛机而言,有一定的码垛精度。,因此选择滚珠丝杠传动更加合适。
综合考虑而言,选择滚珠丝杠传动更加的合适。如图2所示。
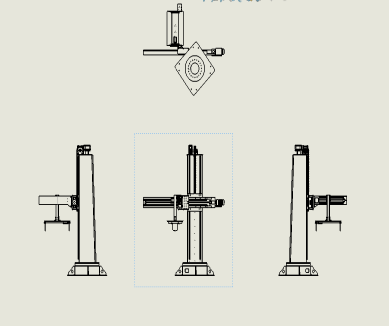
图2.二维图
参考文献
[1]富雅美,王锡海,张军.高位码垛机在大化肥装置中的应用[J].大氮肥,2022,45(06):402-404.
[2]王跃.一种码垛机械手的设计及其计算[J].锻压装备与制造技术,2022,57(05):31-35.
[3]潘知瑶,费叶琦,马竹樵,张明宇,刘雨浩.码垛机发展现状及趋势探究[J].机电工程技术,2022,51(09):88-91.
[4]胡春生,魏红星,闫小鹏,李国利.码垛机器人的研究与应用[J].计算机工程与应用,2022,58(02):57-77.
[5]程相文,王成.码垛机抓手夹持机构的对称性分析与优化设计[J].包装工程,2021,42(13):251-256.
[6]李申.一种小型零部件码垛机结构分析与设计[J].冶金管理,2021(09):41-42.
[7]谢波,邓广基.码垛机械手的手部装置设计与选用[J].机床与液压,2021,49(06):94-97.
[8]Chen Jiwen,Chen Qingpeng,Yang Hongjuan. Additive manufacturing of a continuum topology-optimized palletizing manipulator arm[J]. Mechanical Sciences,2021,12(1).
[9]丛兰强,辛红.一种自动堆垛式码垛机构的设计[J].科技与创新,2020(20):91-92+97.
[10]陈广胜,史步海,张文祖,王越.一种通用性高位码垛机的研究开发[J].中国造纸,2020,39(06):69-74.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



