(湖南工学院计算机科学与工程学院, 湖南衡阳 421008)
摘 要:垃圾造成的环境污染日益严重,现有的垃圾分类技术难以对大规模垃圾进行有效分类,因此人工智能技术在垃圾分类领域的应用成为近期的热点。本文分析了现有的智能垃圾分类模型,采用最新的YOLO v8目标检测算法对垃圾进行智能分类。该模型可以实现垃圾的智能识别、分类和回收,有效提高了智能垃圾分类领域的垃圾识别和分类效率。
关键词: 生活垃圾分类; YOLO v8; 智能垃圾分类; 目标检测; 人工智能
1 引言
随着人工智能技术和计算机视觉技术的快速发展,深度学习领域的图像分类方法不断增多。许多学者对智能垃圾识别分类进行了大量研究,也取得了一定成果,为本文智能垃圾识别分类的研究提供了新思路。宋铁[1]采用机器视觉技术和vgg16神经网络分类算法,结合分类机制,设计了一种家用智能分类垃圾桶,最高分类准确率达88.1%;吴必成等人针对当前垃圾分类中人工成本高、分类效率低的问题,提出了一种基于卷积神经网络的智能垃圾分类系统[2],平均识别概率达到85%以上;黄国伟[3]将Alexnet卷积神经网络模型后三层的结构进行修改,将垃圾RGB图像作为Alexnet卷积神经网络的输入样本进行迁移学习,构建垃圾智能分类模型,准确率在90%以上。本文提出了一种基于YOLO v8的智能垃圾识别分类模型。在实现对垃圾的准确识别和分类的基础上,有效地提高了现有智能垃圾分类设备的效率。
2 材料采集与预处理
2.1.1 样本采集
本试验数据集选取Kaggle 垃圾公开数据集中不同种类垃圾图像500幅。数据集的垃圾都较为清晰整洁,识别率较高,但对杂乱环境下的重叠垃圾识别率较低,因此本文对垃圾精确分类为以下几类[4]:玻璃类、废织物类、废塑料、废纸张、金属类、布料、尘土、有害垃圾、厨余垃圾、废木类、电子废弃物类、活物类。并模拟真实的垃圾场景分别在不同天气、不同光照下拍摄垃圾图片,训练之前要对所有的垃圾图片进行标注,如图1所示。

图1 图像数据集部分样本
2.1.2 样本预处理
为了提高所训练模型的泛化能力,同时尽量避免网络发生过拟合现象,对所获得的图像进行数据增强,通过随机添加噪声、裁剪、旋转、调整亮度和镜像等操作[5],扩充至 2580幅图像。考虑到垃圾站内环境复杂,噪声点多,添加高斯噪声以更好适配实际垃圾站环境。将原始图像采用随机角度旋转、33%的概率水平翻转、33%的概率垂直翻转、33%的概率对角翻转等方式,进一步增强数据的稳定性,增强后的数据图像如图2所示。


图2 数据增强后的数据图像
将增强数据集按照比例8:1:1划分为训练集、验证集和测试集。垃圾存在损坏、脏污、数量多的现象,为了更有效地对垃圾种类检测识别,首先人为对垃圾所在区域进行标注以提高识别效率,然后使用 LabelImg 软件对患病叶片进行标注,添加识别矩形框,同时 LabelImg 软件会成对应的标签文件,图像标注结果如图3所示。

图3 垃圾图像标注法
标注后的 XML 文件并不能直接被YOLO v8算法识别,通过脚本代码将XML文件转换为TXT文件,TXT文件中包含目标类别,归一化后标注框中心点的坐标信息以及归一化后的标注框的长和宽信息。
3 智能垃圾识别分类模型
3.1垃圾图像数据库建设及图像处理
可回收垃圾种类繁多,难以完全收集。我们模拟了真实的垃圾场。在场景中采集并搜索相关垃圾图片,扩展可回收垃圾数据集。为了避免以往可回收垃圾数据集太少、不够准确的缺点,将需要分类的垃圾准确地分为以下几类:玻璃、废布、废塑料、废纸、金属、布、粉尘、有害垃圾、厨余垃圾、废木材、电子垃圾、生物等[6]。
3.2 智能垃圾识别分类回收装置硬件装置设计
智能垃圾识别分类回收装置硬件设计如图1所示。垃圾进入智能垃圾识别分类回收装置时,摄像头接收压力传感器发送的信号,拍照并上传数据进行处理,将分类结果传输给机械爪进行垃圾分类。我们对采集到的图像进行滤波,滤除模糊和重复叠加的图像,然后对图像进行独特的数据增强。建立垃圾映像数据库。之后,我们使用Makesense工具对图像进行标注和导出,并构建垃圾图像数据集,主要使用矩形框标注和多边形标注,以便于以后对垃圾进行定位[5]。

图1 智能垃圾识别分类回收装置硬件结构框图
3.3 各种目标检测算法的比较与选择
我们从目标中检测到两个不同的类别(Two stage和One stage),选择经典算法,导入我们构建的部分垃圾数据集进行训练,然后导入测试集比较结果,如图2所示。


图2 目标检测算法性能比较[6]
从上图可以看出,在垃圾分类领域,YOLO v5算法在速度和准确率上都稍好。然而,YOLO v5在垃圾分类领域已经使用了很长时间。因此,经过综合考虑,我们最终决定训练新更新的YOLO v8算法来训练智能垃圾分类模型。
3.4 YOLO v8模型总体架构图
YOLO v8模型的整体架构如图3所示[7]。
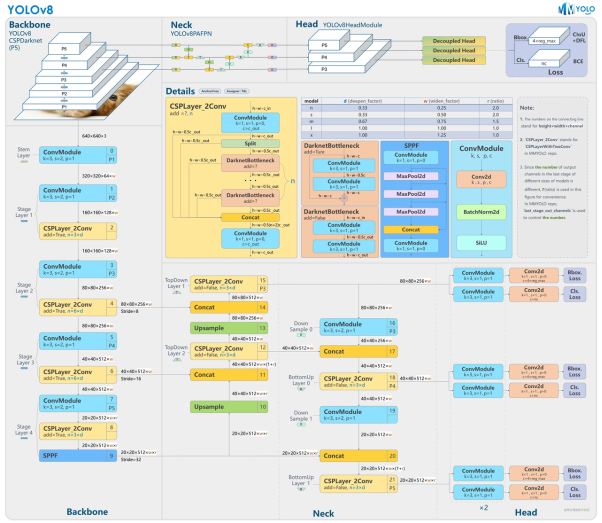
图3 YOLO v8模型的整体架构图
YOLO v8算法分为主干(Backbone)、颈部(Neck)和头部(Head)三个模块,分别负责图像卷积、特征提取与融合、损失函数计算等。CSP的思想贯穿于YOLO v8算法的设计之中。将原始特征图与原始特征图进行卷积运算后得到的结果进行拼接是CSP的思想,可以解决以下三个问题:
①增强CNN的学习能力,在保持准确性的同时实现轻量级
②减少计算瓶颈
③降低内存成本
解决这些问题可以大大减少算法的计算量,并保证精度保持不变或略有提高,从而提高算法的性能。
4 结束语
本文针对垃圾污染问题,基于YOLO v8算法,设计了一种智能垃圾识别分类回收系统,实现对普通生活垃圾的自动分类回收。与现有的智能垃圾分类模型相比,性能有了很大的提高。
参考文献:
[1] SONG Tie.基于机器视觉的家用智能分拣垃圾桶设计研究[D]东华大学,2019
[2]吴必成,邓祥恩,张子耀,等。基于卷积神经网络的智能垃圾分类系统[J].物理实验学报,2019,33(11):44-49.
[3]黄国伟.基于深度学习的城市垃圾桶智能分类研究[D].安徽理工大学,2019.
[4]张涛,于鹏.社区生活垃圾分类回收利用研究——基于沈阳市中心五区调查[J].辽宁经济,2023(05):55-62.
[5]张领,景家平,李淑飞,等.基于自动图像标注和改进YOLOv5的番茄病害识别系统[J/OL]。农业机械学报:1-13[2023-10-16
[6]张晓宇.混合现实目标识别技术与YOLO算法的比较[J]。微处理器、2019、53至59(05):40。
[7]Home - Ultralytics YOLOv8文档
第一作者简介:
陆松涛(2004-),男,江苏省宿迁人,本科生,研究方向为人工智能。
基金项目: 湖南省大学生研究性学习和创新性实验计划项目(S202311528063,S202311528161),湖南工学院大学生创新创业训练计划项目(CY2023254)资助。
E-mail:2338097798@qq.com。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



