中铁八局集团第七工程有限公司 四川成都610300
摘要:本文研究了空心薄壁多联高墩施工中液压爬模的主要性能,并着重对液压爬模的爬升装置、模板移动支架体系、平台支架体系以及液压系统、项目实际工况进行了应用研究。
关键词:空心薄壁高墩;爬升装置;液压系统;维萨板-工字木梁模板体系。
1 导言
近年来,随着交通建设的快速发展,山区铁路和公路桥梁数量也随之增多,其中墩高大于40米的高墩施工一直都是桥梁施工中的重点和难点,高墩施工对整体施工组织安排、模板配置计划、施工质量都有着至关重要的影响。
高墩液压爬升模板(简称爬模)是依附在高墩墩身上,利用爬模系统自身爬升设备随着墩身施工自下而上逐节爬升施工,不需要围绕墩身搭设施工平台脚手架的一种模板施工技术。传统滑模施工工艺具有周转效率快、成本较低的优点和外观质量不易保证、安全系数较低的缺点,而液压爬模施工工艺除了成本略高的缺点外,更值得关注的是爬升速度快、安全度高、实体质量和外观质量好的优点。
2工程概况
XX至XX高速公路工程项目SG5标段,起点位于山庄村大桥(含),止点位于武圣互通,里程范围为K67+033.96-K75+227.953,路线全长8.194km。主线设桥梁2204.02m/7座,占线路总长26.9%。桥梁工程单柱空心薄壁高墩19座,双联空心薄壁高墩28座,三联空心薄壁高墩10座,合计57座。墩身均采用变坡矩形空心墩,变坡矩形空心墩顶口断面尺寸分别为2.1×2.1m、2.3×2.3m、2.6×2.6m,壁厚分别为0.45m、0.5m、0.55m,墩身上部实体高度1m、下部实体高度1.5米。
3 主要研究内容
3.1 工作性能及施工技术参数
爬模技术由维萨板-工字木梁模板体系、钢内模、爬升主体装置及支架平台构成,相对于传统钢模板爬升速度更快,每阶段爬升周期缩短一天。模板与爬升主体相连构成爬模系统主体,液压自动爬架设多层工作平台提供各项操作的施作场地。平台之间预留通道口,在通道口搭设钢爬梯并加以固定实现上下层平台间的连接。在同一平面上,通过钢筋网片以及型钢构成固定底板及围栏,形成整体的封闭工作平台,施工过程中平台也可以保持平稳以及封闭,相对于传统施工工艺安全性较高。
爬升装置由油缸驱动,立、脱模由齿轮齿条驱动,通过远程遥控实现自动化的爬升,液压顶升系统依靠多台液压油缸、相关的控制部件组成,方便地完成提升工作。
在进行爬模的爬升操作时,围绕墩身的整体爬模结构整体向上爬升,带动模板共同均匀上升。爬模油缸通过系统控制器相互协同同步工作。此外,液压体系中所有液压油缸均配备了安全装置用以防止意外导致的油管破裂事故。
墩身内模采用钢模与木模共同组合拼接而成,墩身内倒角和短边尺寸不变的一面采用钢模,长边尺寸缩减的一面采用钢模和木模组合。上下倒角处采用木模,按照图纸规定尺寸定型制作。钢模采用槽钢和角钢进行加固处理,角钢用作钢模四周,槽钢用作背楞,间距为30cm,临近钢模板之间采用高强度螺栓连接加固,内模与外模之间采用精轧螺纹丝杆对拉连接加固,按照模板支护相关规范要求进行间距和布局的设置。
施工以三联空心薄壁墩和双联空心薄壁墩为主,多联墩柱之间的爬模系统通过贯通式的工作平台相互连接,同时实现多联墩柱的施工爬升,大大提高了多联墩柱的施工效率,多联空心薄壁墩的主要参数如下:
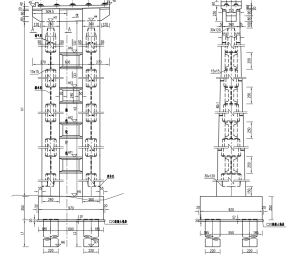
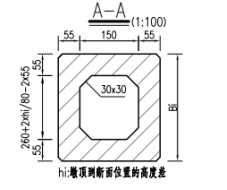
图3-1 双联空心薄壁墩
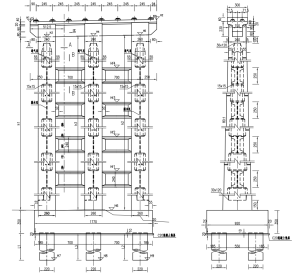
图3-2 三联空心薄壁墩
在进行爬模的爬升操作时,围绕墩身的整体爬模结构整体向上爬升,带动模板共同均匀上升。爬模油缸通过系统控制器相互协同同步工作。此外,液压体系中所有液压油缸均配备了安全装置用以防止意外导致的油管破裂事故。
相对于传统多联高墩施工工艺,液压爬模爬升效率非常高,2-3小时即可完成模板的爬升以及合模,并且得益于全封闭以及完整的多层工作平台,在保证了安全性的前提下,钢筋绑扎、模板校对、混凝土浇筑等施工工序的施工效率也大大提升,平均3-5天即可完成一个节段的全部工序施工。
多联高墩爬模爬升过程中的平面高度控制主要通过爬锥定位埋设和模板精准校核两个环节。爬模每个节段的爬升高度主要通过预埋爬锥进行控制,爬锥预埋的位置限定了爬模爬升的最高高度,通过各节段爬锥埋设的位置即可粗略的控制爬模平台的提升高度;爬锥埋设完成后,在合模阶段通过对爬模模板的顶面高程校核与调整,达到液压爬模平面高度控制的目的。
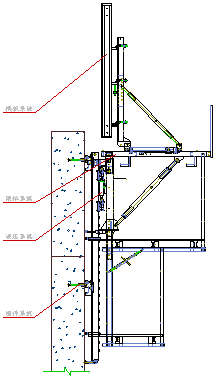

图3-3 液压爬模总体构造图
墩身进入正常节段施工后,均为每4.5m一个节段进行重复循环作业,混凝土浇筑完成→拆模后移→安装附着装置→提升导轨→爬升架体→绑扎钢筋→模板清理、涂刷脱模剂→固定预埋件→合模→浇筑混凝土。
(1)预埋件安装,将爬锥用承载螺栓固定在模板上,爬锥孔内抹黄油后拧紧高强螺杆,保证混凝土不能流进爬锥螺纹内。埋件板拧在高强螺杆的另一端。锥面向模板,和爬锥成反方向。
(2)埋件如和钢筋有冲突时,将钢筋适当移位处理后进行合模。
(3)提升导轨,请将上下换向盒内的换向装置调整为同时向上。 换向装置上端顶住导轨。
(4)升架体时上下换向盒同时调整为向下,下端顶住导轨(爬升或提导轨液压控制台有专人操作,每榀架子设专人看管是否同步,发现不同步,可调液压阀门控制)。
(5)导轨提升就位后拆除下层的附墙装置及爬锥,周转使用。
(6)在进行第一段浇筑时,埋设预埋锚锥,并将锚锥位置误差控制在±1mm内,此后才每一节段的施工浇筑时预埋下一节段的爬锥、挂座、高强螺栓以及电梯预埋组件。
(7)当混凝土强度达到10MPa后方可进行拆模爬升,墩身模板采用人工配合塔吊进行拆除。
(8)在进行外模板关模时,需根据放样点及时调整爬模模板角点位置,保证模板定位精度。
(9)施工空心段时,外模板定位完成后需根据墩身高度确定空心腔室尺寸安装钢内模,并在钢内模上口安装预制盖板封闭空心腔室防止空心段节段混凝土浇筑时混凝土进入,内模架体与外模架体相同,架体及平台拼装顺序一致。
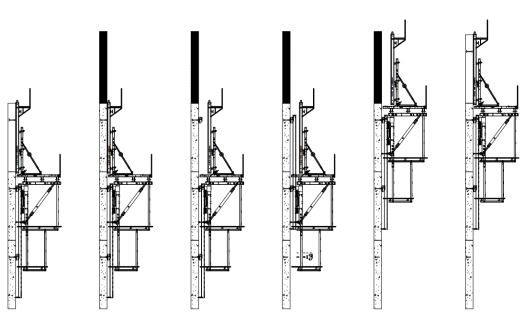
图3-4 液压爬模施工示意图
3.2 爬架系统
爬架系统主要包括液压爬升装置、模板移动支架系统、平台支架系统、液压系统及其相关设施。
3.2.1 液压爬升装置
液压爬升装置在整个液压爬模系统中至关重要,其作用为承受爬模系统自重及施工负荷并在施工过程中对爬模系统进行支撑,当一个施工循环即一模完成施工后在液压系统的推动下爬升至下一个节段进行循环施工直至整个桥墩浇筑完成。
液压爬升装置由爬锥、锚板、爬头、轨道及其扶墙撑、上下爬盒、承重架及下扶墙撑等部件组成。
液压爬升装置的拼装须先进行锚锥的预埋,按照设计将爬锥固定在模板预留孔相应位置上并根据锚筋类型将锚筋、锚锥、和锚锥 保护层装配好并于锚锥定位板连接;然后进行装置的预拼装,主要操作为将爬头与承重架连接,将下支撑与承重架连接并将锚板固定在锚锥位置,将预拼装好的部件挂到锚板上,锁定爬头位置后,将爬箱与爬头及液压缸用进行连接。
爬升轨道需提前在下一循环前安装锚板锚靴,调整爬箱横向的位置,将爬升轨道撑脚连接在爬升轨道上并在轨道上插入限位器放下锚板上的挡块吊起轨道穿过下一节段锚板,将轨道穿过爬头及上下换向盒;下放轨道至楔形块卡在下一节段锚板上并将下爬箱与油缸用销轴稳固连接,最后安装步进装置摆杆、弹簧复位器,旋转轨道撑脚使其支撑在混凝土面上。
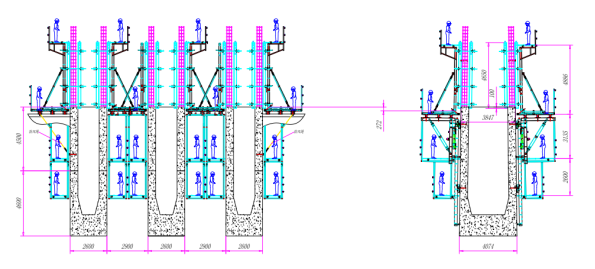
图3-5 三联空心薄壁墩爬架系统图
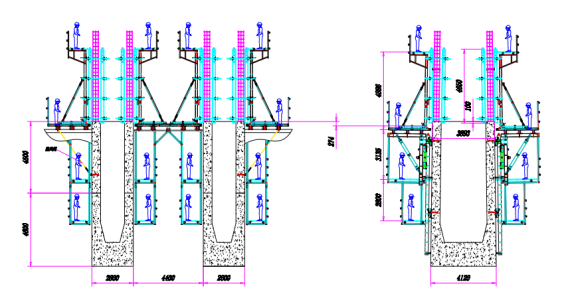
图3-6 双联空心薄壁墩爬架系统图
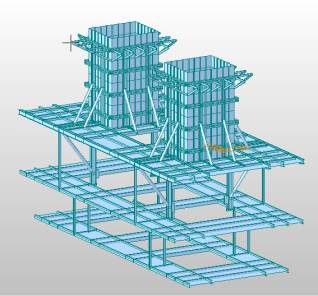
图3-7 双联空心薄壁墩三维建模图
步进装置换向主要分为拆除复位器固定端销轴、换向、安装复位器固定端销轴三个步骤,首先用夹具夹住复位器两端销轴套筒,压缩弹簧,拆除复位器固定端销轴;转动复位器,手柄带动凸轮块换向;安装则是与拆除相同的操作,具体操作如下图所示:

图3-8 步进装置换向方法示意图

图3-9 爬模拼装
3.2.2 模板移动支架
模板移动支架是一个可拆装式的三角稳定支撑体系。主要由竖杆、横梁、可调撑杆及平移油缸等构件组成。移动模板支架的数量根据现场需求进行调整。
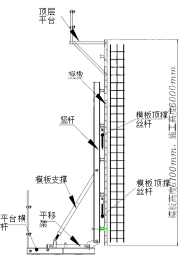
图3-10 模板移动支架
3.2.3 平台支架
平台支架由上爬架和下吊架两大部分组成。
上爬架的主要功能为模板相关作业、锚锥的预埋及墩身钢筋绑扎的工作平台的支撑体系;下吊架作为爬升装置操作,拆除锚锥,墩身混凝土二次修复及电梯工作平台的支撑体系。本项目爬模系统中平台支架共有5层,每层具体功能如下:
第一层:主要用于预埋锚锥的拆除及墩身混凝土表面的二次施工。
第二层:爬模系统进行爬升的平台。
第三层、第四层:进行模板的相关作业如校模及脱模。
第五层:主要用于下一循环节段的墩身钢筋绑扎平台及本节段混凝土的浇筑平台。
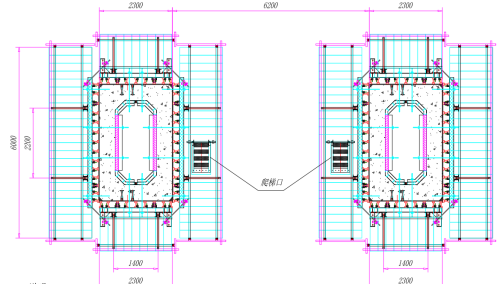
图3-11 爬模平台平面图

图3-12 爬模系统工作图
3.3 液压系统
液压系统为实现爬模自动化上下爬升的关键,其主要由液压动力站、快换管路、液压油缸和电控及其操作系统构成。
3.3.1 液压动力站
动力站由泵组、油箱系统、阀组、冷却系统和电器控制等模块组成。泵组由电机沉入油箱之中;油箱系统和电气控制箱上分布有液位、油温及油路堵塞信号;为提升整个动力站系统的可靠性降低损坏率,使用集成控制阀组用以控制整个动力站系统;系统散热采用联组式的风冷风机保证动力站工作时热量及时散出。
3.3.2 管路系统
动力站内部管路统一进行收集成束,站外管路使用软管保证线路随设备的正常移动,为方便各单元间的拆卸以及安装,各液压缸油路上安装有二通球阀以便于控制压力油的通断。
3.3.3 液压系统操作控制
液压系统动作操作控制是独立的,液压缸不运动时系统卸荷,降低功率消耗,启动时系统卸荷启动。当油箱内油温高于70℃,箱内液位低于箱内液体警报线时控制系统会停机并报警,当液压冷却器出口温度高于47℃时,温控系统会自行启动冷却措施开启风冷风扇设备的运行,而当油箱油温低于10℃时,控制系统会进行卸荷,降低功率消耗并由泵油循环加热。各项操作均可通过操作面板上的按钮实现统一远程控制。
液压泵电机系统设有电路过载及短路保护的相关装置
。液压泵电机采用星三角起动方式,所有系统模块均设置了断电闭锁电路,当液压泵发生了事故导致系统断电后,闭锁电路会使系统及油缸及时处于闭锁状态以防止系统发生事故。

图3-13 爬模液压系统工作图
3.4 效益成果
(1)安全效益
高墩爬模施工期间,项目部加强现场安全巡查,不断增强安全责任意识,未出现任何安全事故,采取了优良的施工工艺和有力的安全保证措施,高墩施工有序推进,获得了地方政府主管部门、建设单位、监理单位的一致好评。
(2)质量效益
通过应用液压爬模系统进行空心薄壁高墩施工,墩身实体强度、钢筋保护层厚度、外观质量等均达到合格验收标准,无任何质量缺陷。
(3)工期效益
多联高墩液压爬模系统,四面组合、整体开合、不需拆除的平面模板体系有效节约了各节段墩身模板的关模、拆模时间,同时高效的爬升效率大大缩短了前一节段完成后到下一节段开始前的间隔时间,此外整体组合和贯通的作业平台实现了多联高墩各小墩同步施工的协同关系。总而言之,通过应用液压爬模系统节约工期约3-5个月,创造了一定工期效益。
4 结束语
本研究通过对高墩液压爬模系统的结构性能优越性进行分析研究,解决了项目面临的高墩施工的难题,并结合本项目特点对既有的爬模系统进行改造,如将刚性外模替换为维萨板-工字木梁模板体系,减轻了爬模系统整体的重量,提升了爬升效率性,并改善了爬模系统对复杂尺寸结构的适应性,并减少了爬模构件数量以及投入套数,在满足了项目高墩施工工期需求的前提下,提升了高墩施工效率以及模板资源利用率,并降低了高墩施工投入成本。
随着山区高速公路以及铁路的迅速发展,为跨越山区复杂的地形条件,桥梁工程中高墩所占比例逐渐提高,而高墩施工所带的工期压力以及模板计划压力使得在保证进度、质量、安全、成本四大生产要素的前提下,高墩施工工艺工法需尽可能的高效、节能、周转性强,本项目作为高墩占比高且工期受高墩施工影响较大的山区高速公路工程项目,所采用的高墩液压爬模工艺可以沿用到其他类似工程项目上,并对工艺工法的优化发展有着积极的指导意义。
参考文献
[1]贺林涛.薄壁空心高墩液压自爬模施工[J].工程建设,2017(1):59-61
[2]黄郑文.山区高速公路桥梁空心薄壁高墩液压自爬模设计与施工[J].世界桥梁,2019,47(3):10-14
[3]李莼,宋富生,王蒙蒙.整体式液压爬模提升施工技术在薄壁空心墩施工中的应用[J].公路,2020,65(9):368-370
[4]黑继东,李霞.液压爬模在桥梁高墩施工中的应用[J].公路交通科技:应用技术版,2018,14(10):268-269,272

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



