中核汇能云南能源开发有限公司 650206
摘要:双馈风力发电机组具备变流器容量小、工作效率高的特性,但风力发电机对电网故障较为敏感,易引发转子绕组过电流、直流母线电容器过电压两种问题,为此,需要采用低电压穿越技术,对双馈风力发电机进的侧变流器进行控制。文章对电机稳态运行、电压瞬时跌落时的暂态运行情况展开了分别分析,提出了两种低电压穿越技术,对两种控制技术进行仿真发现,故障发生后101m便可检测出故障,50ms内可将PI控制转化成为空间矢量滞后电流控制,零序振荡、滞后误差均得到了有效控制,151ms时未出现零序电子磁通受抑制情况,说明复合电流控制技术在响应速度方面表现良好,能够保障双馈风力发电机安全稳定运行,值得在风力场并网运行过程中大力推广与应用。
关键词:双馈风力发电机;低压穿越;PI控制;复合电流控制
风力发电是化解能源危机、降低环境污染的新型能源供应方式,在风力发机规模持续扩大的背景下,风力发电采取了并网运行模式,由于风电场容持续增大,在风电与电网接入时,风力发电机对于低电压穿越技术的要求逐步提升。为提高风能利用率,风电场多采用变速恒频发电机,其中双馈感应发电机是主流机型之一。为保障风电场中双馈风力发电机安全稳定运行,需要结合双馈风力发电机的稳态及暂态分析结果,探寻与此种风电机相匹配的低电压穿越技术,进而为风能发电的持续性、安全性、稳定性发展奠定基础。
1.双馈风力发电机的稳态及暂态分析
1.1稳态分析
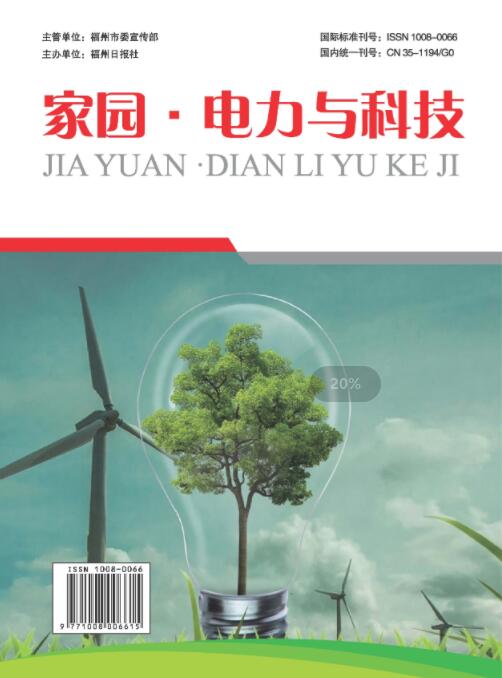
以同步旋转坐标下电机模型为基础展开稳态分析,在不考虑阻尼绕组干扰因素的前提下,感应发电机的电压方程式为:
 (1)
(1)
式中的u表示电压,Ψ表示磁链,R为电阻,I为电流,ρ代表微分算子, s、r分别表示定子侧与转子侧系数,而a、b、c则代表各轴分量。
双馈电机的链接方程为:
 (2)
(2)
式中,Lm、Ls、Lr分别代表转子互感、定子电感以及转子电感,其中,定子电感可通过每相定子漏感与定转子互感相加计算得出,而转子电感则为每相转子漏感与定转子互感之和。利用定子磁链定向分析方式,可以在d轴上定位定子磁链的方向,从而获得定子磁链dq轴分量,即:
 (3)
(3)
结合这三个公式,可以获得双馈风力发电机的简化模型,即:
 (4)
(4)
双馈风力发电机的机侧功功率可分别用下式计算得出:
![]() (5)
(5)
在任意坐标系中,根据双馈电机定子电压、转子电压、定子电流及转子磁通,可以得到坐标系中转子电矢量公式:
 (6)
(6)
式中,Q表示无功功率,P代表有功功率,而Ird与Irq这两个转子电流的无功及有功电流分量,可分别对定子绕组的无功及有功功率进行控制,且两个分量之间不具有耦合关系,因而,可通过解耦控制方式对定子绕组进行有功及无功调控。
转子运动的方程式可表示为:
![]() (7)
(7)
式中的w代表机械角速度,而Pn则是指极对数。
上述方程共同构建了两相d-q同步坐标系下的双馈风力发电机的数学模型及稳态分析结果,简化后的方程使互感间的耦合关系被消除,并为双馈风力发电机矢量控制研究开展提供了丰富的理论依据。
1.2暂态分析
1.2.1电网电压对称跌落暂态变化
在电网电压对称下降的情况下,双馈风力发电机的电压方程矢量形式为:
![]() (8)
(8)
而磁链方程的矢量形式可表示为:
![]() (9)
(9)
其中,![]() 可通过定子电感及定子电流的乘积加上转子互感与转子电流的乘积求出,
可通过定子电感及定子电流的乘积加上转子互感与转子电流的乘积求出,![]() 的计算方式是转子电感与转子电流的乘积与转子互感及定子电流的乘积相加,最后还可得出
的计算方式是转子电感与转子电流的乘积与转子互感及定子电流的乘积相加,最后还可得出![]() 与
与![]() 的关系式,即:
的关系式,即:
![]() (10)
(10)
式中的![]() 代表的是瞬态电感。双馈风力发电机并网运行时,转子侧变频器转子电流产生来源之一的定子磁链幅值不会发生变化,并且空间矢量呈匀速旋转状态。若不考虑定子电阻,定子电压及定子磁链电压的矢量计算公式分别为:
代表的是瞬态电感。双馈风力发电机并网运行时,转子侧变频器转子电流产生来源之一的定子磁链幅值不会发生变化,并且空间矢量呈匀速旋转状态。若不考虑定子电阻,定子电压及定子磁链电压的矢量计算公式分别为:
![]() (11)
(11)
![]() (12)
(12)
设转子呈开路状态,转子电流为0,可进一步计算出转子开路电压幅值,即:
![]() (13)
(13)
此式当中的S表示的是转差率。
1.2.2电网电压非对称跌落暂态变化
在电网电压以非对称状态跌落时,常会出现两种情况,一是单相跌落,二是双相跌落。如果电网电压为三相,其中两相的幅值保持一致,那么出现非对称跌落时,电网电压的相位会对转子电压及初始相位产生影响,同时也是跌落时刻的重要影响因子。电网电压非对称跌落属于相对复杂的情况,在双馈风力发电机出口电压跌幅达到90%时,单相、双相两种跌落类型下的跌落时间及深度、有功及无功功率均存在差异。通过笔者实测分析发现,出口电压跌落至90%时的电压及功率按如下规律变化:小负荷工况运行时,单相跌落与双向跌落的跌落时间分别是1997ms与2003ms,而电压跌落深度则分别为0.9pu,跌落期间有功分别为0与0.16,而无功均为0。大负荷工况运行时,单相跌落、双向跌落分别跌落了2007与2001ms,跌落深度一个是0.905pu,另一个为0.91pu,前者有跌落期间有功及无功均为0,而后者则分别是0.16pu与0pu。
2.双馈风力发电机适用的低电压穿越技术
2.1PI控制技术
2.1.1PI构建控制器数学模型
PI控制是指利用PI回路控制模块对采集的数据与设定值进行对比分析,再根据二者差值重新计算输出值,再按照新输出值进行调控,从而使数据与设定值最大化接近。PI控制器的数学模型为:
 (14)
(14)
其中KP与Ti分别表示调节器的比例系数及积分时间,而e(t)代表的是调节器给定值及测量值的偏差信号。数字信号处理器是PI控制的实现工具,采用位置型PI算法进行计算。将采样时刻的具体数值代入式中,取代掉e(t),以数字积分作为积分,利用位置型算法进行离散化处理后,可将PI控制器的数学模型整理成:
![]() (15)
(15)
上式之中,T与K分别表示采样周期与采样序列号,K取值为自然数。Ki表示的是PI调节器的积分增益。
2.1.2PI调节器参数影响效应分析
双馈风力发电机系统的静态、动态运行情况会受到PI调节器参数的影响,因而合理确定调节器的比例系数及积分增益尤为重要。比例系数的作用是在出现偏差时给出及时的响应,数值与系统响应速度呈正比关系,但比例系数过大,可能会导致系统出现超调、振荡问题,会影响系统稳定性,若此数值过小,可能会由于系统响应不及时而无法保证调节精度。而积分增益能够消除系统的稳态误差,其数值与积分速度成正比,数值过大时可能会导致积分饱和,从而影响系统动态性能。如果数值过小,可能会限制积分作用发挥,无法保持系统稳定运行。基于位置型PI算法的PI控制器结构详见图1所示。

图1 基于位置型PI算法的PI控制器结构示意图
2.1.3基PI控制器的变换器电流控制方法
双馈风力发电机系统的变换器控制时,通常以PI控制器为基础,采取磁链控制或电压矢量控制方式实现。PI控制器应用时,不会产生电流静差,但利用PI控制器控制转子侧交流量时,可能会形成稳态误差,为此,变换器电流调控时,需要在同步坐系中完成三相交流电的有效转化,在控制信号全部在静止坐标系内转化之后再利用PI控制器进行调控,虽然会使控制算法更加复杂,但能够发挥解耦控制作用,提升系统的动态性能,相较于直接进行PI控制而言,对系统稳态性的调控效果更为理想。
2.2复合电流控制技术
2.2.1复合电流控制器结构
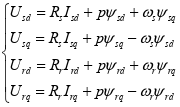
复合电流控制器由四大模块组成,一是检测控制单元模块,二是标准PI电流控制模块,三是空间矢量滞环电流控制器模块,四是重新初始化单元模块。电网处于正常运行状态时,转子侧输出电流可以通过PI电流控制器进行调控,若电网出现故障,检测控制单元检测出这一情况后,会立即激活空间矢时滞环电流控制器,然后启动单元重新初始化程序。复合电流控制器的控制原理详见图2所示。
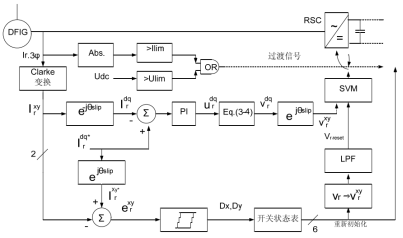
图2 复合电流控制器的控制原理示意图
2.2.2转子侧矢量滞环电流控制运行原理
滞环电流控制器内部装有滞环比较器,用于对比分析电流给定值及输出展值,在二者差异高于环宽大小时,滞环控制器会对逆变器单相上桥臂、下桥臂的功率器件的运行状态进行控制,若电流输出值低于给定值,且二者偏差高于环宽大小的50%,滞环控制器会控制正电平输出,并导通上桥臂功率开关器件,使变换器所输出的电压保持正向。若输出电流值与给定电流值间的差值与环宽的50%相等时,滞环会发生翻转,会控制负电压平输出,同时会断开上桥臂开关器件,随后会对下桥臂开关器件产生驱动,然而并不会使此器件导通。在电机绕组电感作用影响下,电流方向不会反转,但会利用二级管续流,虽会受到反向钳位作用,但不会发生导通。在电压逐步降低到滞环偏差最低值以下时,滞环控制器会再次翻转并呈导通状态。经过多次反复运行,可使电流输出值与给定值间的偏差始终保持在安全范围之内。
2.2.3最优开关模式找寻
电流控制器运行时,电流误差的x、y两个分量分别由四阶延迟比较器与三阶延迟比较器进行控制,控制器会向开关状态表实时反馈所输出的具体数据,进而对各个电流检测电阻在不同时刻时的所矢量输出电压进行获取。通常情况下,矢量控制划分为六个相等的区间,各区间内,控制x、y两个分量的比较器始终处于滞留环中,用于对输出电压的矢量位置进行实时定位,输出电压矢量附近的零电压及非零电压的矢量,能够降低电流控制器的跟踪误差。经过一定时间后,控制x、y分量的比较器会逐步进入下个滞留环,此时,旋转坐标系中的输出电压矢量位置会导致下一个区间发生变化,然后可通过查询开关状态表,找到最佳的开关序列。在空间矢量滞环电流控制器支持下,可以得到一个最佳的开关模式,能够有效降低电流检测电阻开关频率,且对于系统振荡也有明显的抑制作用。
2.2.4控制方法切换机制
双馈风力发电机以正常状态运行时,先利用PI调节控制器控制转子侧电流。在电网出现故障之后,零序分量、负序分量的定子磁通转子电流可能会在短时间内出现升高的现象,若增幅过大会导致PI电流控制器无法及时响应,因此瞬时转子电流控制精度会下降,会出现跟踪误差值高于PI误差宽带的现象。监测控制单元检测出冲击电流之后,会立即将控制模式调整为矢量滞环电流控制,此时,空间矢量滞环电流控制器会快速反应,但此控制器的误差带宽应比PI控制器带宽略大,以便于对电流检测电流开关频率最大值进行限制,确保双馈风力发电机输出电流产生低次谐波失真现象时,能够快速切换回PI调节控制器控制模式。此外,直流母线电压具有故障检测功能,发现故障后可以立即启动空间矢量滞环电流控制器,进而有效防范直流电容器出现过电压现象。
2.2.5重新初始化
PI电流控制器具有瞬态响应速度较慢的弊端,并且在空间矢量滞环电流控制状态向PI控制状态切换时,可能会导致电流检测电阻输出电流产生剧烈波动,此时,需要合理应用重新初始化技术,对PI电流控制器的PI补偿输出进行重置,从而对空间矢量滞环电流控制器向PI电流控制器切换的过程起到过渡保护作用。在重置过程中,需要对PI补偿器的重置值进行统计,主要是利用电流检测电阻的矢量输出电压作为计算依据,并根据采用一阶低通滤波器过滤之后得到的空间矢量滞环电流控制器信号,对电流检测电阻的矢量输出电压进行估算,然后在控制器转换的过程中,通过对矢量电压进行重置,保障电流检测电阻输出电压初始化顺利完成。
3.双馈风力发电机低电压穿越技术应用效果仿真分析
3.1仿真方法
为验证双馈风力发电机低电压穿越技术的效果,本文对结合运用了PI控制器及空间矢量滞后电流控制器的复合电流控制技术应用过程展开了仿真分析。在输电线路上连接一个双馈异步风力发电机,模拟电网由于故障原因而导致风电场电压产生较高降幅,在电压不断下降的过程中,通过自定义可控电压源对双馈风力发电机端不同情况下所产生的电压跌落情况进行模拟分析。为确保采用不同控制技术时,可以得出精准、可靠的对比数据,应将电流检测电阻变换器的外环功率控制环设置为常数,并以最佳转速、功率曲线为基础,对风涡轮机的机械部分展开模拟分析,应设定转子以恒定速度运行,以便将低速度偏差情况纳入分析考量。
3.2仿真结果
通过仿真发现,在电压下降至0.15pu时,转子电流的安全系数为2.0pu,而直流母线电压则为1.25pu,说明转子电流出现故障后,定子磁通零序分量突破了转子控制器安全区间,转子侧有有功功率产生,且转子绕组电流向直流母线电容器中流入。故障发生后101ms时,检测控制模块发现了故障,并在50ms内完成了PI控制向空间矢量滞后电流控制模式的转换,且此过程未出现零序振荡,转子电流内的滞误差未发生变化;故障发生后151ms时,零序电子磁通未受到抑制,且转矩有所下降,达到了1.3pu。通过上述分析发现,应用矢量滞环电流控制器后,三相故障双馈风力发电机的低电压穿越能力得到了有效提升。在转子电流瞬时测量值已知的前提下,出现电压故障或风力发电机系统参数改变时,利用空间矢量滞后电流控制器可以保证低电压穿越正常进行,并且响应速度相对较快。PI控制仿真图与矢量滞环控制仿真图分别见图3与图4。
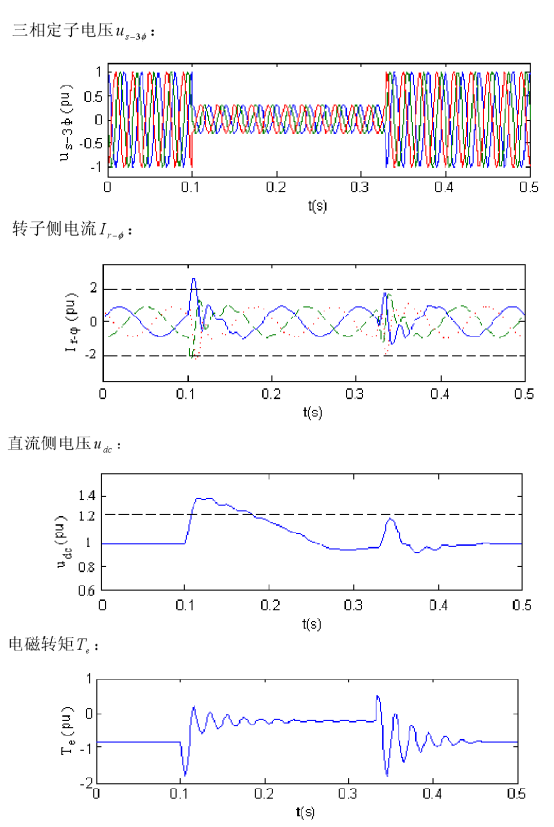
图3 PI控制仿真图

图4 矢量滞环控制仿真图
结语:风能并网发电过程中,低电压穿越技术的应用至关重要,需要按照我国电网并网的要求,在电网电压出现下降时,确保低电压穿越顺畅完成,以防止电网出现故障时,风力发电机的正常运行受到影响,本文针对运用低电压穿越技术控制双馈风力发电机展开了研究,研究总结如下:
(1)双馈风力发电稳态分析后,构建了两相d-q同步坐标系下的双馈风力发电机数学模型,简化后的方程不再具有互感耦合关系,是双馈风力发电机矢量控制研究的重要基础。
(2)通过分析电网电压对称跌落、非对称跌落时的暂态变化,得出三相对地短路故障时定子磁链瞬态变化时转子开路电压幅值计算公式,并总结出电压跌落至90%时的电压及功率变化参数。
(3)提出PI控制技术、复合电流控制两种双馈风力发电机适用的低电压穿 越技术,采用磁链控制或电压矢量控制实现PI控制,需在同步坐标系中转化三相交流电,可通过解耦控制作用,增强系统动态性能,能够提升稳态调控。复合电流控制则在PI控制基础上应用了矢量滞环电流控制,可获得最佳开关模式,能抑制系统振荡防止过电压现象,并能重置矢量电压,顺畅完成电压初始化。
(4)对低电压穿越技术在双馈风力发电力控制中的效果进行仿真,不会产生零序振荡及转子电流滞误差,且不会抑制零序电子磁通,有效提高了双馈风力发电机的低压穿越能力,在双馈风力发电机组低电压穿越中具有较高的应用价值。
参考文献:
[1]郑超.双馈风力发电机组变桨距控制及低电压穿越技术要点[J].科技资讯,2023,21(10):43-46.
[2]刘一星,蔡梅园,陈宝刚等.双馈风力发电机组低电压穿越电气模型[J].船舶工程,2019,41(S1):272-275+278.
[3]杨晨星,杨旭,童朝南.双馈异步风力发电机低电压穿越的软撬棒控制[J].中国电机工程学报,2018,38(8):2487-2495+2558.
[4]董鹏程,华青松,张洪伟等.双馈异步风力发电机组电网故障穿越技术研究[J].青岛大学学报(工程技术版),2018,33(1):1-5+16.
[5]姜惠兰,李天鹏,吴玉璋.双馈风力发电机的综合低电压穿越策略[J].高电压技术,2017,43(6):2062-2068.
附录:双馈风力发电机低电压穿越技术应用效果仿真参数
双馈风力发电机两个出口端变压器的额定电压分别是0.35kV与0.69kV,额定视在功率为1800kVA,空载电流及短路阻抗分别为0.097%与6.09%。升压站变压器两端额定电压分别是66kV与35kV,额定视在功率为90MVA,空载电流为0.0791%,而空载及短路损耗分别是47.6kW与273.7kW。除此之外,双馈异步风力发电机的定子电阻、转子电阻分别设为0.007与0.005,转子漏感及互感依次为0.32与3.2pu,比例系数及积分增量分别取值为0.5与9。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号