云南地质工程勘察设计研究院有限公司 云南 昆明 650041
引言
随着我国的经济发展和现代化城市的不断推进,城市里面人口的密度也变得越来越大,因此地铁交通的需求越来越高,各个城市都把地铁建设纳入为城市建设的重要工程之一。
由于地铁隧道要在地底下建设,因此地质条件、地面上的建筑物等诸多因素都会对地铁隧道结构产生影响,为了保障地铁能够顺利建设和安全运营,将智能型全站仪投入到地铁隧道变形自动化监测中,因为对于一些变形监测要求高的地方需要连续、长期的去监测,才能及时避免事故的发生。论文分析测量机器人在工程当中的应用,结合工程实例介绍智能型全站仪在地铁隧道变形监测的具体应用,实现了在地铁隧道施工过程当中能自动采集监测数据,进行远程传输,在智能化监测平台上数据处理、存储,再多样化输出成果。
1.地铁建设的意义与现状
随着中国开放的大门越开越大,经济的快速发展促进了城市化的发展。这也使城市建设越来越快,城市人口更多,城市当中也都普遍存在着道路上车辆非常堵的情况,因此目前的交通满足不了人们日常的需求。如果一个城市要紧跟时代发展的脚步,交通便利显得格外重要。 地铁交通的优势能表现出来。它占用少量的土地但拥有非同一般的运输能力,相较于普通交通来说速度提高了非常多,同时也产生较小的污染,最关键的是不用在路上堵车,大大地减少了在路上所花的时间,提高了工作效率,能有效的缓解城市中心密度大的状态。
所以地铁的优势主要表现在以下几方面:
(1)地铁交通具有强大的运输能力
(2)地铁交通具有较高的的运行速度
(3)地铁交通具有较高的舒适性
(4)地铁交通具有较高的安全性
(5)地铁交通可以利用地下空间
(6)地铁交通对环境低污染
2.地铁隧道变形监测的意义
地铁建设的投资很大,建设的周期比较长,施工的项目比较多,地质条复杂,容易引起周围建筑物的变形。最近几年,地铁发生过多次塌方。2017年5月位于深圳市福田区绒花路的轨道交通3号线三期工程3131标基坑内土方发生坍塌,3名人员遇难[2]。2018年的时候广东佛山在地铁施工过程发生了严重的坍塌事故,造成了11人遇难。这些事故警示我们需要加强关键指标的监测,能够及时的发现潜在的危险,提供隧道安全预报警信息,做好防护措施防止危机发生。
3. 深圳地铁6号线隧道自动化监测应用
3.1 工程概况
深圳地铁6号线二期由深圳北站至科学馆站,全长11.5公里,设站6座。其中通科区间起点为通新岭站,终点为科学馆站。通科区间隧道下穿既有地铁2号线大燕区间隧道。2号线大燕区间为已投入运营的隧道,区间下穿2号线既有区间隧道,距2号线大燕区间隧道垂直距离约为1.2m。
通新岭站~科学馆站区间线路从通新岭站由北向南走向布置在上步路下方,经过振兴路、振华路到达科学馆站,下穿地铁1、2号线既有隧道,与1号线科学馆站L型通道换乘,如图3-1所示。左线全长797.368m,右线全长797.368m,覆土厚度18.68-25.23m。站前单渡线段设置在靠近科学馆站一端,渡线段左线长83.3m、右线各长77m,中间渡线长14.25m,采用矿山法施工,临时竖井设置在老干部活动中心南侧绿化带中,暗挖段地质从上之下依次为素填土、粉质黏性土、砾质黏性土、全、强风化花岗岩[9]。洞身地层为砾质黏性土,隧底位于全风化花岗岩地层。
通科区间隧道左线在里程ZDK4+180.44~ZDK4+198.50、右线在里程YDK4+167.65~YDK4+185.02处穿越运营地铁2号线大燕区间隧道。
由于通科区间距2号线大燕区间隧道垂直距离约为1.20m,在施工的过程中由于受力的变化易对2号线大燕区间隧道产生一定的影响。为了保证地铁2号线运行的安全,利用人工智能仪器对路基段桩群进行实时监测尤为必要,在动工前需对施工影响区域范围内的地铁2号线区段布设监测点并测得初始值,做好相关协调工作,保证监测工作的实施,信息化指导施工,也是监测工作的重点之一。
3.2 监测内容
根据设计相关要求,主要对下穿点前后50m的2号线大燕区间隧道内的轨道道床进行自动化监测,监测长度130m,重点部位监测断面间距5m,其它部位监测断面间距10m,每断面布点5个监测点,具体布点根据现场实际情况进行调整。监测断面布点如下图3-4所示,主要监测范围为:地铁2号线大燕区间隧道上行线监测里程YDK29+978.210YDK30+108.210;下行线监测里程ZDK29+977.388 ZDK30+107.338。
3.3 监测依据
(1)《城市轨道交通工程测量规范》(GB50308-2008)
(2)《城市轨道交通工程监测技术规范》(GB50911-2013)
(3)《建筑变形测量规范》(JGJ/T8-2016)
(4)《工程测量规范》(GB50026-2007)
(5)《城市测量规范》(CJJ/T8-2011)
(6)《深圳市基坑支护技术规范》(SJG05-2011)
(7)《深圳市城市轨道交通运营管理办法》
3.4监测网的布设
依据现场的环境,再结合相关规范及设计要求进行布置,监测范围在地铁2号线大燕区间隧道上行线监测里程YDK29+978.210~YDK30+108.21;下行线监测里程ZDK29+977.388~ZDK30+107.338。上、下行线共布置34个监测断面,每个断面5个测点,共计170个测点。具体详见图3-5监测平面布置图和图3-6断面布置图,监测断面布置说明如下:
(1)上行线YDK29+978.210~YDK30+108.210范围:在6号线通科区间隧道下穿2号线大燕区间隧道正上方处为每5m布置一个监测断面,其它部位为每10m布置一个监测断面共布置17个断面,每个断面在隧道內布置5个监测点,共计85个监测点。
(2)下行线ZDK29+977.388~ZDK30+107.338米范围:在6号线通科区间隧道下穿2号线大燕区间隧道正上方处为每5m布置一个监测断面,其它部位为每10m布置一个监测断面共布置17个断面,每个断面在隧道內布置5个监测点,共计85个监测点。
(3)每个断面对应的道床中间布设一个轨道沉降点,上行线17个断面对应17个道床沉降点,下行线17个断面对应17个道床沉降点,总计34个道床沉降点。
为保障测量精度,在监测范围内两端各安置3个基准点作为相应仪器的基准点,共计布设基准点12个,基准点远离变形区域布置,与外侧监测断面的距离不小于30米,基准点采用徕卡大棱镜作为标志。为保证监测精度,要控制监测点到测站的距离。测站点和监测点的垂直角小于10度,直线距离控制在140m左右,以保证三角高程的测量精度。
4. 监测成果分析及反馈
4.1测量误差来源
(1)测量仪器自身所带的系统误差
一般由仪器的元件引起的。所以在投入使用时需要对仪器进行检验,达到所需要的精度才能使用。
(2)外界环境的影响
地铁列车运行中会使监测点发生震动,会造成观测数据上下浮动很大,应选择好的监测时间段,地铁内的气压、温度的等也会造成一定的影响。
4.2监测数据处理和分析
一般会有专业的处理软件对监测数据进行处理然后生成报表[11],同时也提供了监测数据曲线变化的绘制功能,绘制监测量随时间变化曲线、监测量速率曲线及进尺过程曲线等[12],还可以将地面与地下监测变形量值进行关联分析。

图4-1沉降过程图

图4-2沉降速率过程图

图4-3水平位移过程图

图4-4水平位移速率过程图
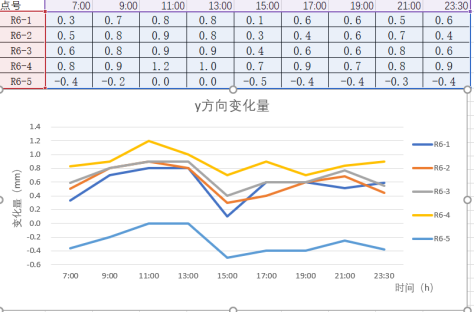
图4-5y方向变化过程图

图4-6 y方向变化速率图
4.3监测成果反馈
所有监测成果均应按照国家相关规范编制标准编制,所有报告均应按照业主要求及时提交。监测报告内容要求如下:
(1)施工和监测工作情况,观测点随时间变化的曲线图,监测所得到的结果放在一起,测点分布示意图。
(2)监测情况说明,观测点是否发生变更,发生变更时应表示在示意图上。当监测的时候发现有异常,根据变形值大小来发出不同程度的报警,说明在监测过程中遇到的问题。
(3)分析所得到的监测数据,对变化异常观测点进行综合分析,对监测点变形是否对周围环境产生影响进行评估。结合监测资料及周围环境来分析变形较大的原因。
(4)根据监测数据提出相应的建议和改进的措施,给出监测点随时间沉降变化的曲线图,沉降速率的曲线图。
(5)将依据监测数据绘出的变化曲线图和需要改进的措施进行汇总,每个监测点按时间顺序用excel表记录。
(6)当某个监测段发现监测数据变化很大时,立即对波动大的测点加多监测的次数,当基坑出现危险事故征兆时,及时启动应急监测预案,监测频率改为连续监测直至危险源解除。
(7)当监测现场发生异常时,如基坑周边出现裂缝、地面荷载增减变化非常大时,应加多观测次数,看现场区域是否增加新的监测点,是否可以进行压力注浆,做好基坑周围的排水工作,直到数据恢复到正常。
1
5. 结论与展望
运用徕卡TM30全站仪进行地铁隧道全自动化监测完全满足所需要的精度,可以全天候的去监测,可以获得完整的监测数据进行稳定性的分析,能保持监测的连续性,监测人员辅助处理,当发生特殊情况下隧道去测沉降点,找出造成变化的原因,当发生超出预警值时及时的发送给有关人员。
(1)变形监测软件系统可以根据事先设置好的方案去对隧道内点进行有序的全自动的监测,将获得的数据存储在数据库当中并自动的对数据进行有序的处理,在监测软件当中显示出来。
(2)能实现测量人员进行远程控制测量机器人进行数据采集,同时避免人为的造成误差和降低意外风险。
(3)经过对深圳地铁6号线二期由深圳北站至科学馆站隧道的建设当中采用自动变形监测的方法表明在数据采集、准时有效、分析处理、预报警等方面都稳定可靠。
1
参考文献
[1] 翟维丽城市轨道交通系统关键技术及相关问题研究[D].吉林.吉林大学2007.
[2]https://zhidao.baidu.com/question/1545965348136972
[3] 姚冬.地铁隧道自动化监测系统的研究与应用[D].东华理工大学.2014.
[4] 李鹏,徐顺明.ADMS测量机器人系统在深圳地铁监测设计与实践[J].工程建设与设计,2012(03):112-116.
[5] 党永超.西安地铁隧道自动化监测技术与变形数据的分析研究[D].长安大学.2015.
[6] 刘冠兰.地铁隧道变形监测关键技术与分析预报方法研究[D].武汉大学,2013.
[7] 刘九阳,杨凤芸,刘森,费明石,杨世杰.TM30测量机器人ATR功能的功效及精度[J].辽宁工程技术大学学报(自然科学版),2015,34(11):1275-1279.
[8] 龚柳,李剑波,陈雄武.运营地铁盾构隧道纠整治技术及其自动化监测研究[J].公路与汽运报.2018.
[9] 沈启炜.基于FLAC^3D数值模拟的地铁异型深基坑开挖阳角效应研究[J].铁道建筑技术.2017.
[10] 毛江才,林廷松,王哲.地铁盾构施工周边环境监测[J].工程质量.2018.
[11] LUO Yanbin,CHEN Jianxun,XI Weizheng,et al.Application of a Total Station with RDM to Monitor Tunnel Displacement[J].Journal of Performance of Constructed Facilities,2017,31( 4) : 04017030
[12] 龚文,邹伟彪.盾构隧道下穿既有运营隧道的监测分析[J].住宅与房地产.2017.
[13] Xing Liu,Shiyu Wei,Qiang Gao,Zhou Qing,Chunlin Ran.Subway monitoring system based on TM30 Georobot Research and Implementation.Advanced Materials Research,2011(368-373):2109-2116.
1
1

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



