(中铁四局集团第一工程有限公司,安徽 合肥 230041)
摘要:线结构光测量技术是在传统立体视觉系统的一种改进和延伸,能够实现被测模型表面三维信息精确、高效的获取。本文设计并搭建用于隧道围岩变形自动监测的线结构光测量技术,浅谈基于线结构光的隧道围岩变形自动监测技术的基本原理和监测参数标定技术,最后通过实际测量对线结构光测量技术进行验证和误差分析。
关键词:线结构光、变形测量、测量终端
0 概述
传统的监测方法是利用全站仪、水准仪、断面仪等对隧道结构进行监测。这类方法获得的数据滞后于现场报警需要,难以实现对隧道的整体化、智能化监测。针对目前铁隧道监控量测,需研发一种基于线结构光测量终端的隧道围岩变形自动技术,无需复杂的安装过程,即可实现实时不中断地监测隧道全断面结构形变,从而实时跟踪结构变形趋势、及时发现隧道结构变形。在有较大结构变形发生时能够及时发出预警,为确定变形报警限值提供参考,可为后续施工工艺、工法的改进及预留变形量等提供数据支撑。
1 隧道围岩变形自动监测技术
1.1线结构光测量基本原理
该技术采用直射式激光三角法,与斜射式激光三角相比,其具有更广的测量范围、更小的测量盲区,并且线结构光在被测物体表面不会发生偏移。线结构光测量终端的整体结构组成如图1所示。线结构光测量终端由硬件系统和软件系统两部分组成,其中,硬件系统负责监测过程中的图像采集。软件系统主要负责光条中心点的坐标提取,并根据测量系统的标定算法来算出被测物体表面特征点的世界坐标,可得到完整的被测物体表面轮廓数据。

图1线结构光测量终端整体结构
1.2线结构光测量终端组成
基于线结构光测量终端的隧道围岩变形自动监测技术由测量主站、断面测量终端、测量服务器、操作终端、软件平台五部分组成,通过在掌子面及初期支护侧壁安装隧道断面监测终端,可在隧道围岩断面形成多条完整监测光带,进而实现对掌子面和侧壁断面结构变形监测,并将参考监测终端安装在二次衬砌稳定区域侧壁,形成稳定的参考点线基准;通过在仰拱闭合区或二次衬砌区安装的分析控制主站,同时对监测光带和参考光带进行非接触式智能分析和测量,实现隧道围岩变形的实时不间断监测。隧道围岩变形自动监测技术组成与在隧道监测区域的布置示意见图2。

图2 隧道围岩变形自动监测技术硬件组成
测量主站与终端无线通讯,无需电缆连接,两者均加载自身位移及振动监测功能,从而保证监测结果稳定可靠,为避免测量终端受施工干扰,其两侧安置有防爆挡板,且内置设备脱落监测装置。测量主站结构图见图3,测量终端结构图见图4。
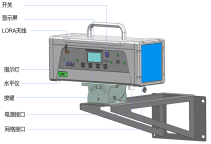

图3 测量主站结构图 图4 测量终端结构图
为防止粉尘对对线结构光测量终端造成影响,一方面,在处理模块上添加数据识别系统,当线结构光照射到粉尘颗粒物时,仪器将返回错误代码并剔除。另一方面,为避免大量的灰尘散落在测量主站从而遮挡传感器,因此,在测量主站镜头前端增加防尘旋转门结构,通过自动控制的方式,在数据采集前自动打开旋转门,数据采集结束完成之后自动关闭。
1.3线结构光隧道围岩变形测量原理
在实际操作过程中,安装于隧道上的测量终端发出可以覆盖隧道全断面的线结构光。线结构光的光线在图像中有一定宽度,需提取线结构光曲线中心线代表结构光每个坐标点的位置,为保证运算速度于精度,系统采用重心法进行光线中心提取,它以光条宽度方向截面内灰度极大值附近多个像素点的灰度值与位置关系的乘积作为权重,计算灰度重心作为光条中心点。这种方法会使得光条中心点向极大值附近灰度值较大的像素点偏移,可以减小极值法由于光条光强分布不均匀、不对称而引起的误差。
设有𝑔(𝑖,𝑗)表示光条图像第i行、第j列的像素点灰度值,𝑀𝑗表示光条图像第j列的灰度极大值行坐标,n为光条图像宽度方向截面内极大值的单边权重像素点个数,那么第j列的光条中心点行坐标𝐶𝑗为:

在发生形变时,被测物体表面的特征分布会与之前存在差异,因此通过测量主站采集结构光图像时,被调制的光条图像发生了变化,系统会通过线结构光图像采集和分析对比,利用测量系统数学模型或者一定的标定算法即可算出特征点的世界坐标。由于被监测断面通常位于结构不稳定区域,测量终端本身存在位置变动的可能,为消除测量终端自身位移的影响,测量终端上配备圆形靶点光源,通过计算圆形靶点中心在水平方向和竖直方向的位移量,获取测量终端自身位移量,并在计算隧道截面变形时予以补偿。
隧道数据处理单元加测隧道结构状态,区分是否发生隧道单截面沉降、收敛,多截面整体沉降等病害。优选区域偏移差值算法,检测方法如下:
(1)划分隧道壁区间,分为左右侧壁和拱顶部分,左右侧壁检测横向和纵向位移,拱顶检测纵向位移。隧道拱顶、侧壁区域划分见图5

图5 隧道拱顶、侧壁区域划分示例
(2)实时线结构光曲线中心线与基准线匹配,优选差值计算算法,比较不同区间基准线前后像素偏差,逐个比较像素横向或纵向位移变化,每段区间内图像像素的差值作为1个序列,采用多项式平滑(SG)滤波对差值序列进行平滑,多项式平滑滤波是移动窗口的加权平均算法,普通的滑动窗口平滑算法为:
![]()
式中:![]() 为元素
为元素![]() 平滑后的值,w为窗口大小,
平滑后的值,w为窗口大小,![]() (
(![]() )为序列窗口内的元素值。
)为序列窗口内的元素值。
而多项式平滑滤波是卷积平滑,基于最小二乘法原理对数据进行拟合。隧道拱顶沉降及周边收敛计算示例见图6。

图6 隧道拱顶沉降及周边收敛计算示例
(3)隧道多截面整体沉降监测,优选组合线差异算法,结合隧道前后多条线结构光曲线中心线匹配结果,其中1条或多条整体下移为隧道多截面整体沉降病害。
(4)沉降量空间映射,通过像素量化将像素位移转换为空间偏移距离,获得实际沉降量,并根据位移方向对应病害类型。
1.4试验结果分析
为测试该技术的精度和可靠性,设置标定检测系统,该系统由标定工装及附属控制系统组成,可以模拟拱顶沉降、侧壁收敛,并由标定工装可设置沉降、收敛值,测试时将标定工装分别移动10、50、100mm,并采用传统监测手段对相同位置进行数据采集。对传统监测数据与线结构光监测数据进行对比分析,总结出两种测量方式的趋势相关性及线结构光测量终端的测量准确性,详见表1和表2。
表1 拱顶沉降测量精度检验结果
标定工装位置(mm) | 测量次数 | 传统监测(mm) | 线结构光测量终端(mm) | 差值(mm) |
10 | 1 | 10.23 | 10.39 | 0.16 |
2 | 10.77 | 11.01 | 0.24 | |
3 | 10.81 | 11.12 | 0.31 | |
50 | 1 | 50.05 | 50.12 | 0.07 |
2 | 50.21 | 50.11 | 0.10 | |
3 | 50.12 | 50.30 | 0.18 | |
100 | 1 | 100.16 | 100.06 | -0.10 |
2 | 100.25 | 100.31 | 0.06 | |
3 | 100.13 | 100.27 | 0.16 |
表2 收敛测量精度检验结果
标定工装位置(mm) | 测量次数 | 传统监测(mm) | 线结构光测量终端(mm) | 差值(mm) |
10 | 1 | 10.52 | 10.67 | 0.15 |
2 | 10.76 | 10.98 | 0.12 | |
3 | 10.93 | 11.11 | 0.18 | |
50 | 1 | 50.21 | 50.43 | 0.21 |
2 | 50.36 | 50.52 | 0.16 | |
3 | 50.17 | 50.28 | 0.11 | |
100 | 1 | 100.06 | 100.23 | 0.17 |
2 | 100.23 | 100.38 | 0.15 | |
3 | 100.14 | 100.27 | 0.13 |
经对比分析,拱顶沉降量平均差值为0.13mm,收敛测量平均差值为0.15mm。自动监测和常规监测测得数据基本一致,这两种方法测得的数据都符合现场实际情况,见图7和图8。因此,可以证明线结构光测量终端的自动监测技术测量精准性可以满足现场监测需要。


图7 水平收敛监测对比折线图图8 拱顶沉降监测对比折线图
1.5线结构光测量终端现场实际应用
为进一步检验该技术的可行性,将该技术应用于某铁路隧道进行实际监测,见图9~12;图13为某隧道某段的五期沉降数据图。


图9 隧道内部情况 图10 测量主站


图11 测量终端 图12线结构光测量终端现场位置

图13隧道变形观测数据类型
表3为某隧道某段的变形观测数据。
表3 线结构光实际测量结果
监测里程 | 测量期数 | 拱顶累计沉降值(mm) | 水平累计收敛值(mm) |
DK1+500 | 1 | 0.00 | 0.00 |
2 | 5.02 | 1.11 | |
3 | 5.97 | 1.32 | |
4 | 6.11 | 1.69 | |
5 | 6.22 | 2.02 | |
DK1+520 | 1 | 0.00 | 0.00 |
2 | 4.31 | 0.97 | |
3 | 4.76 | 1.56 | |
4 | 5.05 | 1.68 | |
5 | 5.11 | 2.02 | |
DK1+540 | 1 | 0.00 | 0.00 |
2 | 4.19 | 0.69 | |
3 | 4.56 | 1.32 | |
4 | 4.96 | 1.68 | |
5 | 5.22 | 1.99 |
2 结论
本文基于线结构光三角法的基本原理,设计与搭建了一套完整的基于线结构光测量终端的隧道围岩变形自动监测技术。该技术具有全自动智能分析、连续实时监测、无需安装反光棱镜、全断面监测、设备无线通信电池供电、易拆卸安装等明显优势。同时该测量技术可同时部署多个测量终端,实现多断面测量,提高了监测效率,且部署方便,极大程度上避免了人为因素干扰。在数据处理方面,基于重心法的光条中心提取不仅可以保证处理速度,还可以减少小极值法由于光条光强分布不均匀、不对称而引起的误差,从而实现实时有效监测、及时报警、极大程度上降低了安全事故突发的风险。
参考文献
References
[1]基于线结构光的视觉测量系统关键技术的研究[D].天津大学,2021.DOI:10.27356/d.cnki.gtjdu.2021.003066.
[2] 李勇兵,高成明,马盈盈,王洁,周银.三维激光扫描技术在隧道变形监测及检测中的应用[J].科学技术与工程,2021,21(12):5111-5117.
[3]刘春,梁晓东,吴勇生.隧道施工监测三维激光全断面扫描方法研究[J].中外公路,2020,40(04):210-212.DOI:10.14048/j.issn.1671-2579.2020.04.045.
[4]詹显军,王先龙,陈礼伟,曹自印,唐斌.隧道变形自动监测系统在南广铁路隧道施工中的应用[J].现代隧道技术,2012,49(05):128-131.DOI:10.13807/j.cnki.mtt.2012.05.023.
[5]许定伦,王官云,王文浩,苏建坤,刘庆志.基于激光测距的隧道自动监控量测仪器应用研究[J].公路交通科技(应用技术版),2020,16(03):259-260.
[6] Zhang Z.Y. A flexible new technique for camera calibration [J]. IEEE Transaction on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334.
[7] Zhang Z.Y. Flexible camera calibration by viewing a plane from unknown orientations [C]. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, 1999: 666-673.
作者简介:丁圣文,男,1989年生,安徽六安人,毕业于安徽建筑大学,大学本科,工程师,主要从事工程测量及其管理工作。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



