(中国电力工程顾问集团东北电力设计院有限公司,吉林,长春130021)
摘要:为实现光伏并网逆变器的最优控制,提高电网电压不平衡下光伏并网系统的稳定性。本文分析了两相静止坐标系下光伏并网逆变器的优化控制策略,建立了并网逆变器控制系统的优化数学模型。采用粒子群优化算法,提出了基于满意优化理论的光伏并网逆变器控制参数整定方法,解决了电网电压不平衡下光伏逆变器的并网稳定性问题。并利用双坐标变换实现了新型锁相环的设计,以保证在电网电压不平衡或畸变的情况下,光伏并网逆变器可进行快速准确的单位功率因数运行。通过数字仿真和实验分析,验证了理论分析的正确性,光伏并网系统动态、静态和谐波抑制性能得到了优化。
关键字:光伏并网逆变器;满意优化;粒子群算法;锁相环
引言
并网逆变器是分布式发电中的关键部件为向电网输送高质量的电能,并网系统需能进行快速、准确、稳定的控制[1]。带LCL滤波器的并网系统能有效地消除开关谐波,但其构成的三阶系统增加了控制器模型的复杂性,其谐振峰值对系统稳定性也提出了更多的要求[2]。此外,来自电网的扰动包括谐波、电压跌落、电网阻抗扰动等[3]对逆变器并网控制提出了更高的要求。因此光伏并网逆变器控制器的设计需要满足多个性能指标。
目前常用的并网逆变器PWM控制策略主要有:PID控制虽然可以快速无差的跟踪系统中的直流分量,但积分控制无法消除周期性扰动分量所带来的稳态误差[3];状态反馈控制系统传递函数的极点和控制系统性能相关[4];滑模变结构控制可以实现逆变器控制系统在干扰不确定性下的鲁棒性,获得较为满意的动态性能[5];重复控制可以提高光伏并网逆变器系统的跟踪精度,改善系统品质[6]。
但上述控制方式都只简单地解决了控制精度和响应速度中的单一问题,没有考虑到光伏并网逆变器的综合性能[8]。为获得控制系统的综合最优性能,基于满意优化方法的思想,采用群优化算法(Particle Swarm Optimization, PSO),本文提出了光伏并网逆变器电流环控制器参数的满意优化策略,其基本思想是:当发现优化可能陷入停滞时才调整ω并对最优粒子进行扰动,使得增强粒子活性更具针对性,更加有效。将该算法应
用于光伏并网逆变器电流环控制器参数优化中,综合考虑了控制系统的各个性能,包括响应速度和稳态误差,以及系统超调等。此外,传统的锁相环在电网电压不平衡时不能准确跟踪电压信号[7]。本文为了解决电网电压不平衡下并网的稳定性问题,提出了基于双坐标变换的新型锁相环设计方法。该锁相环系统利用双派克变换实现电压信号正序基波分量的提取,解决了电压不平衡问题。
1 三相光伏并网逆变器的数学模型
为光伏并网逆变器的拓扑结构,主电路由光伏电池板,直流侧稳压电容,交流侧滤波电感,交流侧滤波器电容,IGBT全控桥,交流侧电网组成;控制电路由双闭环控制模块、坐标变换环节、数字锁相环节和SVPWM模块等组成。
其中vsa,vsb,vsc分别为交流侧三相电压,vdc是直流侧母线电压,S1~S6为功率开关管IGBT。旋转坐标系下的逆变器数学模型较复杂,是一个高阶,非线性,强耦合的多变量系统,在该坐标下进行控制器的设计,需要对耦合量进行解耦,控制器比较复杂[14]。而在两相静止坐标系下的数学模型相对更简单,更容易控制。
图2为提出的控制策略,其中直流母线有功功率控制,电压外环采用PI控制器。电流内要求环响应速度快,调节并网电流,实现单位功率因素并网,还有消除谐波的作用。为了实现电流环控制器的综合性能最优,本文结合改进的粒子群优化算法和满意优化理论设计电流环控制器。
2 光伏并网逆变器电流环控制器参数优化设计
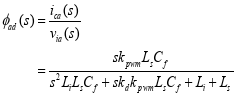
由图3得,电流环控制器输出至网侧电流的传递函数关系式为:
![]() (1)
(1)
由滤波电容电流信号构成的反馈系统闭环传递函数为:
 (2)
(2)
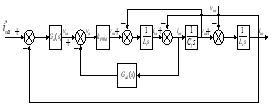 图3电流环控制框图
图3电流环控制框图
Fig.3 Current control loop
GB/T 19939-2005规定:三相电压的偏差为额定电压的±7%;频率偏差值为士0.5 Hz;总谐波电流小于逆变器额定输出的5%;平均功率因数不小于0.9;直流分量不超过交流额定值的1%。为使并网逆变器满足国标要求,电流环控制器采用滞后-超前校正,控制器![]() 的结构为:
的结构为:
![]() (3)
(3)
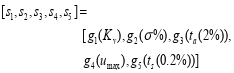
其中K,T1,T2,α,β均为可调参数,且T2≥αT1,β≥α≥1。于是给出优化参数变量为:
![]() (4)
(4)
利用经验值设计控制器的三个性能指标满意度函数。为达到逆变器综合性能最优,再增加两项性能指标要求:对控制量u(t)的幅值限制要求umax和限制响应“爬行”情况的要求ts(0.2%)。构成如下的性能指标变量
![]() (5)
(5)
对各个性能指标的满意度函数:
 (6)
(6)
分别给出。综合满意度函数线性加权形式fL。
图4 控制器系统各个性能指标的满意度函数
(a)控制系统稳态误差满意度函数 (b)控制系统超调量满意度函数 (c) 控制系统误差小于2%调节时间满意度函数 (d)控制系统幅值限制满意度函数 (e) 控制系统误差小于0.2%调节时间满意度函数
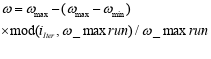
加权系数选取为![]() 计算控制器参数时采用改进粒子群算法。为了增加种群的多样性,算法采用了Ring型邻域结构以及LocalBest策略以削弱全局最优粒子的影响力。该算法为对于Ring邻域拓扑结构的LocalBest PSO算法,其每步迭代中的第i个粒子速度与位置更新表达式如下:
计算控制器参数时采用改进粒子群算法。为了增加种群的多样性,算法采用了Ring型邻域结构以及LocalBest策略以削弱全局最优粒子的影响力。该算法为对于Ring邻域拓扑结构的LocalBest PSO算法,其每步迭代中的第i个粒子速度与位置更新表达式如下:
![]() (7)
(7)
![]() (8)
(8)
 (9)
(9)
具体的算法流程图如图5所示。
用MATLAB对系统进行仿真,改进PSO算法参数选取如下:粒子数为N=30;惯性因子范围[0.9,0.4],学习因子为c1=c2=1.5;迭代次数为T=20;粒子的搜索范围和飞行速度范围式(5)和式(6)选取。优化后得到的控制器的优化参数为{ K,T1,T2,α, β}={ 92.81,0.026,0.73,10.25,11.23}。
 图5 优化算法流程图
图5 优化算法流程图
Fig.5 Optimization algorithm flowchart
3 新型数字锁相环的原理和控制结构
利用基于双派克变换自解耦模型提取不平衡电压的基波正序分量。对称的三相正序分量进行正负序派克变换后,可得到电压信号的直流分量和二倍频交流分量。
式(10)和(11)中dq+1和dq-1轴对应的电压幅值分别为Vs+1和Vs-1。dq轴的耦合导致旋转方向相反的矢量,引起二倍频的振荡。这些振荡是由检测Vs+1和Vs-1引起的扰动。传统的扰动消除方法会造成滤波效果和响应速度之间的矛盾。
5 结论
1).给出了满意优化模型与粒子群优化算法相结合的控制系统参数自动寻优方法。
解决了系统稳定性与动态特性的问题,满足了控制系统性能指标设计的多方面要求
2).提出的双坐标变换的三相锁相环能解决电网电压不平衡的跟踪问题,为控制系统提供了实时的精确的参考信号。
3).将性能指标设计与控制器参数优化融合一体对光伏并网逆变器控制系统进行了优化。仿真和实验结果表明了其较强的静态、动态响应能力和谐波抑制能力,具有较好的应用前景。
参考文献
[1]王学华, 阮新波, 刘尚伟. 抑制电网背景谐波影响的并网逆变器控制策略[J]. 中国电机工程学报, 2011, 31(6):7-14.
[2]鲁力, 刘芳, 张兴, 朱德斌. 弱电网条件下单相光伏并网逆变器的控制研究.电力电子技术, 2012, 46(5):36-38.
[3]童立青, 钱照明, 彭方正. 同步旋转坐标谐波检测法的数学建模及数字实现[J]. 中国电机工程学报, 2009, 29(19):111-117.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



