西南交通建设集团股份有限公司 云南昆明 650000
摘要:长悬臂盖梁可调节长度托架是一种用于支撑悬挑结构的重要施工设备,本文对长悬臂盖梁可调节长度托架施工进行了研究,首先分析了长悬臂盖梁可调节长度托架施工难点,然后阐述了薄壁空心墩液压爬模双肢同步爬升施工工法,以期为相关人员提供参考。
关键词:长悬臂盖梁;双肢墩同步爬升施工;可调节长度托架施工
引言:
长悬臂盖梁可调长度支架是桥梁建设中常用的一种支撑结构。在桥梁施工过程中,需要采用支架对盖梁进行支撑,而传统的固定长度支架在悬臂施工过程中不能满足要求,所以出现了可调长度支架。
1 长悬臂盖梁可调节长度托架施工难点
长悬臂盖梁一般安装在高处,可调长度支架则需安装在悬架系统下面。这样就会产生一定的空间约束,使其很难在狭小的空间内安装和调整。调整长度支架时,需对其长度进行精确的控制与调节。这就要求操作者有一定的经验与技巧,以及使用合适的工具与仪器以达到精确调整的目的。否则,可能会导致悬架系统不稳定,或者不能满足规定的长度要求。长悬臂式盖梁可调长度支架需与支架有效连接并配合,才能保证稳定及安全。施工时,应保证支架之间的接触面足够牢固,并采取合适的防震防松措施。长悬臂式盖梁要承受很大的荷载,可调长度支架需要对其进行合理地分配和平衡。施工时应认真考虑荷载分布及受力情况,以保证支架对悬吊系统的稳定支撑。
针对施工中遇到的困难,建议在施工前做好详细的规划,全面评估施工中的风险,加强与专业技术人员的密切配合。适当的培训与指导,有助于提升施工队伍的技术能力,保证施工过程的顺利实施,达到预期效果。
2 薄壁空心墩液压爬模双肢同步爬升施工工法
2.1薄壁空心墩液压爬模双肢同步爬升施工工法概述
薄壁空心墩双肢液压爬模同步爬升施工工艺,为解决100 m以上高桥墩施工难题提供了一种新的技术途径。传统施工工艺在复杂地形条件下对线形渐变精度要求较高,平面及垂直度偏差难以控制,而薄壁空心墩双肢液压爬模同步爬升施工工艺可解决上述问题。采用专利爬模操作平台、爬模模板支架、爬模承重销拆除工具等设备,使双肢薄壁墩操作平台成为一个整体,为施工提供更大的作业空间和安全可靠的作业环境。对液压爬模系统进行优化设计,实现两条腿共用一套爬升系统,达到同步爬升的目的,使单节桥墩施工工期缩短至3-4天,较传统工法6-7天显著提高,加速施工进度,提高工作效率。中系梁施工阶段,仅需拆掉两侧的内侧模板,即可实现墩柱和系梁的同步浇筑,从而进一步提高了施工质量。同时,在浇筑、爬升过程中,实时监测整体结构的变形与位移,根据监测结果及时调整,保证施工精度。薄壁空心墩液压爬模双肢同步爬升法,具有良好的社会和经济价值。该方法可使复杂地形条件下的高墩桩基更具可行性,并可提高施工质量,缩短工期,降低造价。西南交通建设集团公司已在多项工程中应用该项技术,并取得相关发明专利。该技术在桥梁建设中的推广应用,具有技术先进性和创新性,推动该产业的进一步发展[1]。
2.2薄壁空心墩液压爬模双肢同步爬升施工工法施工工艺原理
薄壁空心墩双肢同步爬升法施工工艺为:
地面拼装:前、后肢在地上组装,前、后肢按设计要求组装。这一工序可在远离工地的地方完成,以减小对工地的影响。
分段吊装:前、后肢组装完成后,用吊装设备将已拼装的桥墩分段吊装至施工地点。此时桥墩的高度尚未完成。
分段连接锁固:桥墩吊装到施工位置后,采用钢筋扣件等方式将前、后肢分段连接,并锁紧,形成整体。从而保证了前、后肢在施工过程中的有效配合。
液压爬升作业:由一套液压爬模顶升系统来控制前、后肢的顶起动作。利用液压油缸带动无缝管导轨与爬架交替顶升实现桥墩的提升。无缝管导轨穿过爬架下部框架立杆,并由液压千斤顶共同承担垂直荷载。
支撑与平衡:在爬架上设置环形桁架来平衡水平分力,在浇注混凝土的过程中,导轨及爬模架支承在预埋件支架上,以保证稳定及安全。
退模及调试:浇注混凝土后,进行退模作业。在退模后留下的锥台上安装螺栓、座体等设备,经调试后,桥墩满足设计要求。
顶升爬模座:拆除后,启动油缸,使爬模座相对于导轨移动。利用导轨与爬模架交替附壁,互相抬升,使爬模架沿墙内预留的爬锥一层一层上升[2]。
以上为薄壁空心墩双肢液压爬模法施工工艺的基本程序。采用该方法,可实现墩柱的快速施工与精确控制,提高施工效率与质量,并保证施工安全。
2.3运用有限元进行全过程施工模拟分析
采用有限元法开展全过程施工仿真分析,可用于评估不同工况条件下结构的安全状态,确定关键环节的控制要点,评估不利工况的影响。根据工程实际及设计要求,提出了合理的施工方案,确定了各工作状态下的分析点。每一种工况都包含了施工阶段,载荷情况,材料特性等。建立合适的有限元模型,包含结构的几何参数,材料属性,边界条件等。在模型中增加了模板支撑、顶升位移等变形量。在不同工作状态下,按施工阶段依次施加相应的载荷及边界条件。计算中可考虑活荷载,温度变化,土压力,混凝土浇筑等。在此基础上,利用有限元软件对结构进行计算,得出各施工阶段的位移、应力和变形等结果,对结构的安全进行评价。在此基础上,评价结构的变形和应力等参数,比较不同工况下的结果。把注意力集中在可能存在的弱点和潜在的问题上。在此基础上,确定关键工序的控制关键点,并对其进行监控与调整,确保施工安全与精度。在此基础上,根据不同工作条件、不同施工阶段对结构进行分区,提出合理的支撑体系、顶升体系、浇注顺序等控制方案。采用现场观测与监测手段,实时监测施工过程中的位移、变形等数据,及时调整施工措施,确保工程的精度与安全
[3]。
以上就是利用有限元法对全过程进行仿真分析的一般过程。在此基础上,进一步了解结构在施工过程中的受力情况,找出存在的问题,及时解决,以保证工程的安全与质量。
2.3薄壁空心墩液压爬模双肢同步爬升施工工法工艺流程
液压爬模爬坡控制系统的建立针对双肢薄壁空心墩施工,必须建立完整的控制系统。主要的施工流程见图1。
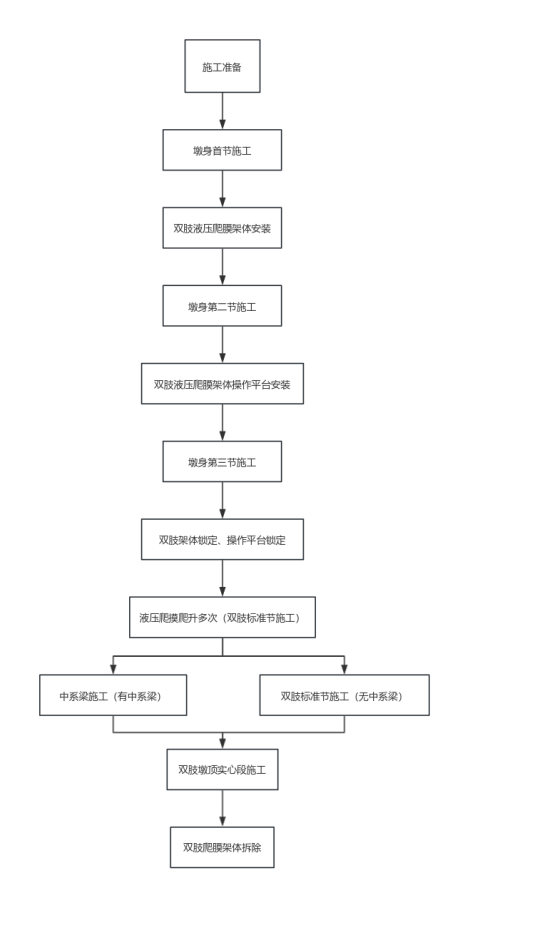
图1 双肢薄壁墩液压爬模同步爬升施工工艺流程
2.4薄壁空心墩液压爬模双肢同步爬升施工工法操作要点
2.4.1施工准备
薄壁空心墩双肢同步爬升法施工工艺的操作要点有:准备工作、墩顶立模板边线放样检查。保证起重机运行的道路平坦、坚实,能够完成装卸、运输作业。爬模地面要找平,各部分的位置要标明。确保爬模的地面环境满足施工要求,并能安全地进行装配作业。根据设计要求,对桥墩位置进行放样,并测定其轴线及标高。组织复验,保证放线精度。根据设计要求,利用测量工具、标线工具,对桥墩的轴线及标高进行标定。为保证其精度,对已放完的墩柱立模板边线重新进行复核。检查各标志点的位置是否与设计要求相符,如有偏差应及时调整。
以上就是薄壁空心墩液压爬模双肢同步爬升施工工法的操作要点。为了保证施工精度和安全,施工准备、桥墩立模板边线放样、验线等工序十分重要。每一道工序都要严格遵循以上几点,施工过程中要严格控制与检查[4]。
2.4.2爬架组装
1组装三脚架
组装三脚架的步骤如下:
首先布置组装场地,根据各部件吊装分段的尺寸,为三脚安装提供适当的场地。确保场地平整,符合安全要求。备好2个500毫米×2400毫米的模板,将模板放置在水平地面上,位置与爬锥中间的距离一致。保证两根轴完全平行,并与木板的连线成90度角。用量具检查对角线长度,保证误差在2毫米以内。这样可确保三角架装配后的结构稳固。把三角架的扣环放在木板的轴线上,保证三角架的中距与爬模第一次浇注时的中距相等。再次检查三角架对角线误差,确定误差在2毫米以内。将平台竖柱安装在三脚架上,用钢管紧固件固定。要确定垂直的柱子是牢固的和垂直的。用钢管紧固件固定两个三角架。确保连接牢固可靠。
这就是三脚架组装的要点,这样才能搭建出稳定、可靠的三角架。在组装过程中,要注重精度与精度,以保证组装好的三角架能满足结构要求,并能起到很好的支撑作用。
2安装平台板
安装三脚架后,一定要保证底座和三脚架牢固地连接在一起。在施工过程中,应采用适当的支撑及调整措施,以保证台板在施工时能均匀地承受荷载。若台板与其他组件有抵触,则需在适当位置打孔或裁剪,以保证台板能完整安装,而不影响其他零件的使用。在安装台板前,将两个三角架的中距调整到第一次浇注时的中距是否一致。使用测量工具对产品进行检验,并根据需要对产品进行调整,以保证产品的准确性。
这样就能保证安装后的台板平整、牢固、符合施工工艺要求。安装完毕后,应对其进行质量检验,以保证其稳定可靠[5]。
3.组装模板、操作平台
准备必要的桁架,木梁,主后楞,斜撑等构件,保证其质量满足要求。四根木头横梁垫在模板下面,起到支撑和稳定的作用。一定要保证木梁均匀地分布在地面上。在模板上安装主背楞和斜拉条。注意调整主背楞与模板背楞间的支承状态,保证其牢固度及垂直度。模板与主背肋连接处采用 U形接头配合插销进行连接。一定要确保连接牢固,以便提供稳固的支撑。检查已安装好的作业平台是否平整,牢固。为确保平台稳定,应使用水平仪及测量工具进行检查。
2.4.3液压爬模分段吊装
1. 吊点选择
为防止起重物发生翻转、摇摆或倾斜,应尽可能使吊点位于物体重心铅垂线之上。在选择吊装点时,要保证吊装对象结构能承受所有荷载,保证安全。对于细长物体的吊装,需对其强度进行计算,合理选取若干吊点,使荷载均分,保证结构的安全性和稳定性。采用2个吊点,Φ36钢丝绳。一方装有手动葫芦,可调整位置,并保证吊绳与水平面的角度最大不小于60度,以提高稳定度。
2. 安装和测量定位
从第一节混凝土浇筑起,按照爬架间距精确放线,保证预留孔位置精确。在预埋孔处清除锥形销钉表面,涂上黄油。然后将预埋件安装到已焊好的定位套中,并在锥销处加钢筋网片进行加固,防止在受力过程中孔裂。在混凝土强度达到拆模要求的情况下,才能拔出锥销。其余墩节预留孔按同样方法依次安装。拆除第一节墩模板后,将预埋锥销拔下,安装挂板,插入锥销锚固。安装架体、围框和平台,保证其垂直度。待下一节段混凝土的脱模强度达到要求后,再进行第二节段桥墩钢筋的安装。待混凝土达到脱模强度后,将预埋锥销拔下,将模板移开,安装爬架立杆,检查各部分的性能和受力状态。安装起重平台,双肢墩之间的爬模用双拼槽钢连接,用手拉葫芦拉结,以保证稳定性。安装爬模架体后,利用全站仪测量其垂直度、平面坐标、高程等关键点的坐标。通过与设计值的比较,得出了施工误差,并作了相应的调整。
这样既能保证桥墩的安装、测量定位精度,又能及时纠正施工误差,确保桥墩准确施工。
2.4.4双肢液压爬模同步爬升
双腿液压爬模同步爬升工艺为:
首先安装锁紧双腿液压爬模,安装前、后肢钢筋,按普通薄壁墩的施工步骤,安装爬模预埋件,移模前移,浇筑混凝土。将模板向后移动,安装下一节墩的钢筋,如此反复,重复上述工序。
双肢薄壁墩施工至中系梁位置后,拆除邻近系梁一侧的模板。其他三面模板可继续正常攀爬,系梁施工完毕后,再将模板移至系梁顶面,第一节墩身采用内、外模板相互拉紧,浇筑过程中预先埋设液压爬模锥销。浇筑一节墩后,安装爬架,安装爬模,恢复双肢液压爬模正常施工,直至墩顶施工结束。
2.5薄壁空心墩液压爬模双肢同步爬升施工工法质量控制
预埋部位的轴线及相对间距必须精确。为了保证预埋件的准确定位,采用了精密放样的方法。液压爬模因其整体截面尺寸过大而无法运输,需将其拆下后分批运至工地进行整体组装。组装时,按设计图放置控制线,焊接挡块,按工艺图进行定位,调整零件中心线和控制线对齐。同时,应对架体宽度、高度进行复核,严格控制误差不超过设计及规范要求。经复核无误后,方可进行试装工作,并接受检查。安装完毕后,再将其转运至待安装的位置。使用的计量器具必须在有效期限内进行检测和校准。由专业的测量员承担测量任务,利用多点光学联测技术实现平面位置的测量。双肢薄壁空心墩可按“内外联合控制法”进行施工。为保证安装精度,选取两个主控制点,用全站仪对其进行观测[6]。
结束语:
总之,对于长悬臂盖梁可调长度支架的施工,在理论上和工程上都有很大的参考价值。通过合理的选型,合理的设计,合理的操作,提高施工效率,保证施工安全,保证质量。在此基础上,针对施工过程中存在的问题,提出合理的施工方案及措施。
参考文献:
[1] 张信浩,钟德明.高架桥大悬臂盖梁支架施工技术探讨[J].山西建筑, 2022, 48(3):3.
[2] 唐辉.斜拉悬臂支架在大悬臂盖梁中的施工技术研究[J].广东土木与建筑, 2023, 30(9):97-99.
[3] 孙凡.双肢墩大悬臂盖梁支架设计及施工研究[J].价值工程, 2022, 41(10):3.
[4] 朱晓伟.高速公路桥梁项大悬臂盖梁支架施工技术研究[J].中文科技期刊数据库(全文版)工程技术, 2022(5):4.
[5] 李鹏辉.城市高架桥软基地区大悬臂盖梁现浇支架施工技术研究[J].中文科技期刊数据库(引文版)工程技术, 2022(11):7.
[6] 陈云锋,李亮亮,喻晓洪,等.独墩大悬臂预应力盖梁施工工艺浅谈[J].建筑机械, 2023(8):68-70.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



