陕西黄河集团有限公司 陕西 西安 710043
摘要:雷达测试技术发展,对于我国军用、民用雷达技术水平与实际使用质量的提高,有着重要促进作用。本文针对雷达接收机灵敏度测试方法技术开展革新研究,为雷达测试技术整体发展提供理论支持。
本文提出了一种改进的灵敏度时间控制方法,对灵敏度时间的控制深度和控制距离分别分档控制,用于改善相控阵雷达接收机的动态范围,具有使用灵活性大、控制精度高的特点。该改进方法采用FPGA和DAC相结合的技术,根据雷达方程优化了算法,可以灵活地拟合出相应的指数曲线用于控制压控衰减器,实现灵敏度时间控制。
关键词:雷达;接收机;灵敏度时间控制(STC)
1: 引言
战术相控阵雷达不仅需要观测远程空间目标,也需要观测隐身目标和其他低可观察目标等,目标的有效散射面积(RCS)有很大变化,因而对接收系统动态范围设计就有很高的要求。
接收机灵敏度测试平台是开展测试工作的基础设备,也是技术人员首要开展的技术革新环节。在测试平台设计中,主要技术内容包括了以下几点。(1)确定信号流通方式。(2)以雷达技术指标为基础,确定测试信号强度。(3)选择合理的信号源。(4)利用质量较好的功率测试频谱仪与计算探头,做好信号输出功率与频谱的检测工作。(5)采用人工检测监控工作。
针对雷达接收机大动态的需求,本文采用数字和模拟相结合的技术,利用FPGA优化算法,拟合出数字化的电压控制曲线,再通过DAC转换为模拟的高精度电压控制曲线,实现接收通道中压控衰减器的衰减值随着电压控制曲线的变化而变化,最终实现接收通道的增益随着时间(距离)指数型变化,达到灵敏度时间控制的目的。由于FPGA的可灵活编程特性,文章提出了对灵敏度时间的控制深度和控制距离分档控制的方法,用以满足雷达在复杂环境下对于雷达接收机的动态范围扩展的不同需求。
本文首先讨论了灵敏度时间的设计原理,然后分析了灵敏度时间控制曲线的算法优化,提出了灵敏度时间的控制深度和控制距离的分档控制具体方法,最后给出了仿真和测试的结果。
2: 灵敏度时间设计原理
雷达回波信号的强度近距离大,远距离小,随距离呈现指数型衰减。而雷达对威力需求通常要求接收机要具备较高的灵敏度以探测远距离的目标,这样势必会造成近距离的雷达回波过大从而导致接收机饱和。为了避免接收机的过于饱和,就需要进行灵敏度时间设计,使得接收机的增益在近距离时有较大的衰减,而随着距离的增加,接收机的增益逐渐增大,变化曲线呈指数型,以满足雷达系统对目标探测范围的要求。
本文的灵敏度时间设计如图1所示,该相控阵雷达接收机采用超外差式,射频信号经过两次混频,将中频信号ADC采样后送给信号处理,灵敏度时间电路设计在第一中频。如果对动态范围有更大的要求,也可以将灵敏度时间设计在射频,这样通过压控衰减器在射频前端的起控,可以获得最大的动态范围,同时由于接收机前端对噪声系数恶化的影响最大,灵敏度时间起控时会造成整机噪声系数的迅速恶化;当然还由于射频的频率更高,对压控衰减器和灵敏度时间电路的设计要求也会更高。
鉴于战术雷达的实际应用情况,将灵敏度时间放置在第一中频可以满足雷达接收机动态范围的扩展要求,并且第一中频由于频率较低,可以在降低设计成本的同时获得更好的灵敏度时间控制精度,更重要的一方面是,灵敏度时间放在第一中频时,由于前面已经有了两级以上的低噪声放大器,灵敏度时间起控时可以较小地影响接收机整机噪声系数的恶化。几乎没有将灵敏度时间设计在第二中频的,因为第二中频之前往往已经有了多级的放大器,这样灵敏度时间就起不到延缓接收机放大器饱和的作用,也就失去了设计的意义。
3.1 灵敏度时间分档控制方法
当灵敏度时间控制距离为10Km时,控制深度就定了下来,为40dB。由此可见,当控制深度和控制距离需要分别独立设置时,方程就有了局限性。而战术相控阵雷达面对复杂的环境,控制深度和控制距离往往需要根据实际情况进行分别独立的设置。因此,本文提出了一种灵敏度时间控制深度和控制距离分别分档控制的方法。
有三种控制距离和四种控制深度,1种灵敏度时间对应1种控制距离和1种控制深度,则一共有12种分档控制的灵敏度时间,这样就可以满足战术雷达在不同的环境中选择不同的合适的灵敏度时间的需求。
3.2灵敏度时间改进算法
针对STC控制距离和控制深度分别分档控制的需求,对公式进行优化,设为控制深度,为灵敏度时间开始起控的距离,R为雷达距离,则雷达距离R处,STC需要控制的深度为:
其中,为雷达距离处的雷达回波功率,为雷达距离R处的雷达回波功率。再由公式\可以将公式推导为:
需满足R>同时R小于控制距离,并且当雷达距离R等于控制距离时,A=0。
在雷达方程中,雷达回波功率与距离的四次方成反比,但是在通常的雷达应用中,可以取雷达回波功率与~之间的数值成反比,因此,设之间的任意值,可以将灵敏度时间的公式优化为:
就可以根据雷达所处环境的具体情况,作出最适合雷达探测的灵敏度时间最优值。
4 仿真与测试结果
4.1 仿真结果
取分档控制方法中的1种为例:控制距离14Km,控制深度24dB,其他以此类推。
灵敏度时间电路中,压控衰减器的电压-衰减值变化曲线如图所示。
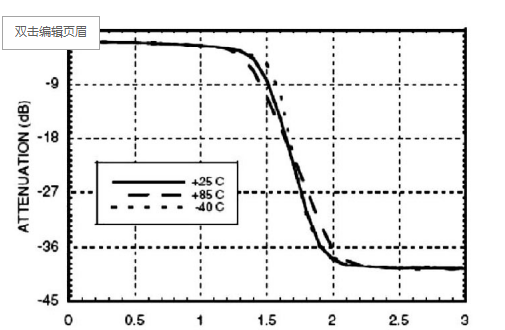
通过图,就可以得到电压(V)与控制深度(dB)之间的关系,从而就可以拟合处随距离而变化的电压曲线,从而实现灵敏度时间控制。
4.2 测试结果
灵敏度时间控制曲线的电路是由FPGA结合DA的方案实现,其根据仿真结果所拟合出的控制曲线在某型号的接收机中进行了测试,接收机噪底随灵敏度时间的变化情况见图5。
5 结语
本文采用了FPGA和DAC相结合的技术,根据优化的算法灵活地拟合出STC控制曲线,实现了对灵敏度时间的控制深度和控制距离分别分档控制,有效地改善了相控阵雷达接收机的动态范围。 利用新型的雷达接收机灵敏度测试技术方法,在提高测试精度的同时,实现了自动化与信息化测试目标,进而保证了雷达测试技术的整体进步。为此技术人员开展了全面的技术研究工作,保证其设计理论与实践的共同进步。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



