四川铁道职业学院 四川省成都市 611732
绝缘子是一种特殊的绝缘控件, 能够在架空接触网供电中起到重要作用。早年间绝缘子多用于电线杆,慢慢发展于高型高压电线连接塔的一端挂了很多盘状的绝缘体,它是为了增加爬电距离的,通常由玻璃或陶瓷制成,就叫绝缘子。绝缘子不应该由于环境和电负荷条件发生变化导致的各种机电应力而失效,否则绝缘子就不会产生重大的作用,就会损害整条线路的使用和运行寿命。
绝缘子是接触网供电的重要组成部分,是唯一的电气绝缘件和重要的结构支撑件,绝缘子性能及其配置的合理性直接影响线路的安全稳定运行。轨道交通接触网供电采用的绝缘子主要分两大类.一类为应用于耐张串的盘型悬式玻璃绝缘子,另一类为应用于悬垂串和跳线串的棒型悬式复合绝缘子。在长期的运行中,两种类型绝缘子表现出不同的运行性能及特点。
绝缘子常年暴露在大气中,受雷击、污秽、鸟害、冰雪、高温、高寒、高差等因素影响,会导致各类事故的发生。
雷击事故。架空线路通道通常为丘陵、山地、空旷地带及有污染的工业区,线路极易遭遇雷击致绝缘子击穿或爆裂。
鸟害事故。研究表明,绝缘子闪络事故中,有相当一部分是鸟害引起。鸟害事故中,相比于瓷绝缘子、玻璃绝缘子,复合绝缘子发生闪络事故的可能性更高。鸟害引起的绝缘子闪络事故多发生在110千伏及以上输电线路上,35千伏以及下城市配电网中绝缘子因鸟害发生的闪络事故较少。原因是城区内鸟群相对较少,线路本身的电压不高,能击穿的空气间隙较小,绝缘子无需安装均压环,伞群能够有效防止鸟害闪络事故的发生
污秽事故。污秽事故是指积聚在线路绝缘子表面上,具有导电性能的污秽物质,在潮湿天气下,受潮后使绝缘子的绝缘水平大大降低,在正常运行下发生的闪络事故。
其中污秽事故占约事故中的百分之80,所有绝缘子的清洗在保证接触网安全高效运行尤为重要。
缘子清扫最常用的三种方法:1、停电清扫;2、不停电清扫;3、带电水冲洗
1、停电清扫
停电清扫就是在线路停电以后工人登杆用抹布擦拭。如擦不净时,可用湿布擦,也可以用洗涤剂擦洗,如果还擦洗不净时,则应更换绝缘子或换合成绝缘子。
2、不停电清扫
一般是利用装有毛刷或绑以棉纱的绝缘杆,在运行线路上擦绝缘子。所使用绝缘杆的电气性能及有效长度、人与带电部分的距离,都应符合相应电压等级的规定,操作时必须有专人监护。
3、带电水冲洗
大水冲和小水冲两种方法。冲洗用水、操作杆有效长度、人与带电部距离等必须符合业规程要求。
在电力输送过程中,为了降低电能消耗,均采用高电压输送。我国采用了国际上通用的27.5KV的接触网单相交流电输送,使得接触网的电力可以输送到较长供电臂的末端,实现偏远山区的电气化铁路。
接触网支柱上的绝缘子由于受到空气污染的影响,在其表面会有一层导电性的污渍,在潮湿的天气里,绝缘子的绝缘性能会大大降低,容易发生闪络现象,导致停电事故。因此,对污秽绝缘子的清洗工作便是接触网维护工作的主要内容。
清洗是在带电情况下进行的,所以对清洗操作人员的安全提出了很高的要求。除了保证人与带电体必要的安全距离外,还要保证人体所处的电场符合裸露部位的人体表面局部电场强度应不超过240kV/m。由于高压绝缘子大部分处于高处的塔架上,清洗起来格外困难。
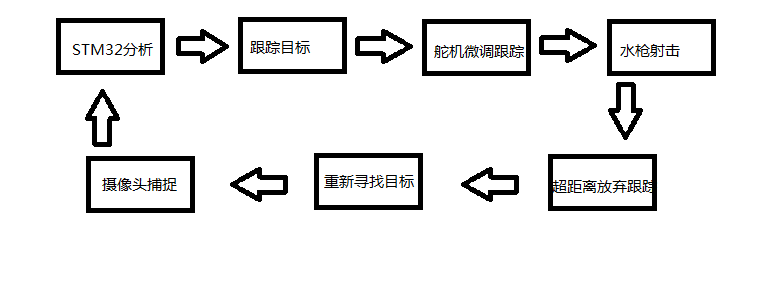
基于STM32的图像分析控制高压水枪进行清洗
1、绝缘子识别
要用摄像头学习来实现绝缘子识别,无论是训练还是识别阶段都需要提取图片中绝缘子的特征值,我们将从绝缘子的周长、面积、颜色、长度、宽度等特征值进行提取。
读取摄像头图像、转为灰度图像并降噪
from math import *
import cv2 as CV
import numpy as np
img = cv. imread(path)
gray = cv. cvtCol or (img,cv. C0L0R_ BGR2GRAY)
blurred = cv. GaussianBlur(gray,(3, 3), 0)
获取绝缘子轮廓
xgrad = cv. Sobel (blurred, cv. CV_ 16SC1, 1,0)
ygrad = cv. Sobel (blurred, cv. CV_ 16SC1, 0,1)
edge_ _output = cv. Canny(xgrad, ygrad, 50, 150)
cloneImg,
contours,heriachy = cv. findContours(edge_ output, cv. RETR EXTERNAL, .
cv. CHAIN_ APPR0X_ _SIMPLE)
cv.findContours将图片中识别到的轮廓返回给contours变量, contours是一-个list类型数据,里面存放了识别到的所有轮廓。有时候并不能很好的将目标轮廓完整的识别出来或者有没有去除掉的噪点的干扰所以不能简单粗暴的将获取到的轮廓全部运用。
获取长度、颜色、宽度
# !usr/env/bin python3
from math import *
import cv2 as cv
import nurmpy as np
file =’/Users/ apple/Desktop/vi deo/ image-1/
p=file+' data. txt'
#f = open(p, 'a' )
def myCut(img, x,y, w,h):
cut=imgly:y+h,x:x+w]
cv. imshow(" cut”,cut)
return cut
def GetColor (img,point_ height, point_ wi dth) :
R= 0
G=0
B=0
count = 0
color = []
for i in range(0,len(point_ height), 1):
count += 1
R += img [point_ height [i], point_ wi dth[i]][0]
G += img [point_ height[i], point_ wi dth[i]][1]
B += img [point_ height[i], point_ wi dth[i]] [2]
R = int(R / count)
G = int(G / count)
B = int(B / count)
col or. append(R)
col or. append (G)
col or. append(B)
return color
2、CPU跟踪分析、舵机微调
控制跟踪就是微调舵机角度,角度是由来自控制线的持续的脉冲所产生。这种控制方法叫做脉冲调制。脉冲的长短决定舵机转动多大角度。例如:1.5毫秒脉冲会到转动到中间位置(对于180°舵机来说,就是90°位置)。当控制系统发出指令,让舵机移动到某一位置,并让他保持这个角度,这时外力的影响不会让他角度产生变化,但是这个是由上限的,上限就是他的最大扭力。除非控制系统不停的发出脉冲稳定舵机的角度,舵机的角度不会一直不变。
当舵机接收到一个小于1.5ms的脉冲,输出轴会以中间位置为标准,逆时针旋转一定角度。接收到的脉冲大于1.5ms情况相反。不同品牌,甚至同一品牌的不同舵机,都会有不同的最大值和最小值。一般而言,最小脉冲为1ms,最大脉冲为2ms
根据摄像头的参数让摄像头中心及高压水枪的中心始终瞄准绝缘子进行喷洒,当摄像头的图像捕捉到的长宽高小于设定值及远离高压水枪的射击距离,即放弃目标,重新寻找下一目标。
基于图像识别接触网绝缘子带电快速清洗,可以假设在作业车上,由于作业时不再人工操作,作业人员远离危险。作业速度快、精度高,不影响正常运营,可不停电作业,是大跨距,长线路,大作业量清洗的方向。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



