营口理工学院 辽宁省营口市 115100
摘要:针对果农对于较高果树采摘困难,当前主要利用凳梯高空作业,危险性高,工作效率低的特点,提出此工具研发,大大提高采摘效率,节约人工成本。在日常生活中,水果采摘对于果农来说是一大难题,人工采摘虽然灵活性较高,但其成本也较高。而当前国内同类采摘器大致可以分为:一、机械手式采摘器;二、电动控制采摘器、三、刀片切柄式采摘器; 针对以上三种水果采摘器做以如下分析:机械手式水果采摘器原理是利用手柄控制拉线进而控制摘头,摘头上手抓固定水果后利用人力将水果拽下,但是凭借人力容易拽断树枝并损伤水果,且操作不便。对于电控制采摘器主要是把由电动机(或电磁力)催动具有切(剪)功能的机械构件和控制该构件动作的是电路元件装置在无盖容器上,在有水果进入容器时能完成水果蒂的切(剪)动作,使水果脱离果树。此产品虽利用先进技术,但是制造成本较高,操作不便,实用性不强。然而刀片式主要是通过手柄控制拉线以控制刀片,利用刀片将水果柄剪切断,剪下的水果利用刀片下端的网兜接收水果,或是让水果顺着摘杆滑下接收水果。同时本设计采用人体仿生手臂,增加支撑杆等辅助装置,一举改变了采摘设备“头重脚轻”的弊端,大幅提高了采摘效率,操作方便、省力,有着广泛的应用前景。
关键词:手持式;水果采摘;机械;效率
在农村生产的生活中,水果采摘不便利问题一直未得到合理有效的解决。本设计提出一种单人手持式水果采摘器(如图1所示),较为有效的解决了采摘不方便的问题。
机械手式水果采摘器原理是利用手柄控制拉线进而控制摘头,摘头上手抓固定水果后利用人力将水果拽下,但是凭借人力容易拽断树枝并损伤水果,且操作不便。对于电控制采摘器主要是把由电动机(或电磁力)催动具有切(剪)功能的机械构件和控制该构件动作的是电路元件装置在无盖容器上,在有水果进入容器时能完成水果蒂的切(剪)动作,使水果脱离果树。此产品虽利用先进技术,但是制造成本较高,操作不便,实用性不强。
本新型采摘器设计的目的是为了在地面上就可以进行水果的采摘,无需再通过爬树采摘水果,提升了水果采摘时的效率,并使果农的工作环境更加安全。 基本思路是:由一手则推动摘杆上的支撑杆滑块,通过支撑杆来确定切刀角度,另一手握紧摘杆把手以通过手闸将水果与树枝分离,达到采摘水果的目的。
在设计该装置时,首要考虑的是装置功能的实现,即切刀的实用性和有效性。经过测试,首先传动装置的连续性;根据制造装置的材料的特性,摘杆、滑块等部件需设计为最优值,既能达到省力的效果,又能保证传动无阻;实现了装置高效便捷的功能。
在确定设计方案以后,根据产品的功能进行了采摘装置的设计,最终得到的采摘器装配图如图所示。
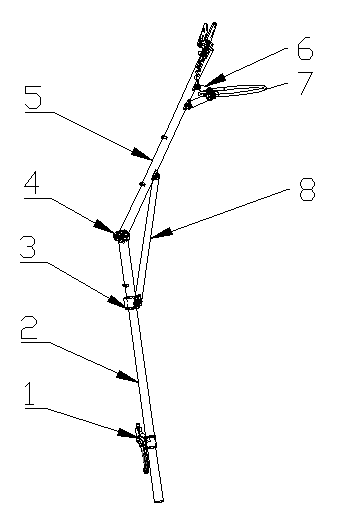
单人手持式水果采摘器装配图
1、手闸 2、下杆 3、支撑杆滑块 4、连接杆
5、上杆 6、支撑杆 7、金属圈 8、支撑杆
单人手持式水果采摘器的工作原理为:当推动支撑杆滑块时,调上杆移动,改变切刀的角度,当确定角度后,转动支撑杆滑块上的固定旋钮固定角度,抓握手闸,通过线带动主动刀片,将水果与树枝分离,使得水果落入由金属圈所支撑的网袋中,并传输到地面。滑动滑块,使滑块的在下杆运动,通过固定旋钮固定所需的角度。
通过抓握下杆的手闸带动由摘杆上的传送装置将动力传达至弹簧,带动联动装置使主动刀工作旋转。
当水果与树枝分离后将通过由金属圈支撑起的网袋传送到地面。
1)此设计结合人体手臂结构,实现弯折,操作简单,使用灵活。
2)此装置增加了支撑杆,既省力,又大幅提升了采摘效率。
3)此装置可将水果直接运输至地面,增加了采摘的连续性。
4)可以根据水果大小安装不同规格的网袋,可适用于绝大部分品种的水果采摘。
本采摘器通过滑块控制摘杆的角度,同时通过摘柄上的操纵把手控制拉线以控制摘头切刀,摘取水果。切刀将被压紧的弹簧弹回原位,完成采摘全过程。本作品采用手柄控制切刀和滑块控制上杆与切刀的角度,且可以根据水果种类更换网袋,达到一器多用的实用性、经济性目的,并采用弹簧来达到切刀自动复位的效果,与同类产品相比具有明显的优势。本产品适用于大规模的采摘水果,具有操作方便、灵活,不损伤水果、省时省力的特点,很大程度上提高了劳动效率。鉴于本产品的各种优点,较于市场上此类产品本产品功能更加完善,实用性更强,更经济,方带,加工成本低廉,可根据国标做出不同的规格,可在人们生产生活中得到广泛应用。推知本产品定会在水果采摘器领域占有优势。
参考文献:
[1] 李洪.机械加工工艺手册[M].北京:机械工业出版社,1990
[2] 方昆凡.公差与配合技术手册[M].北京:北京出版社,1984
[3] 莫雨松、李硕根等.互换性与技术测量[M].中国计量出版社,1988
[4] 孟少龙.机械加工工艺手册第1卷[M].北京:机械工业出版社,1991
[5] 王季琨、沈中伟、刘锡珍.机械制造工艺学[M].天津:天津大学出版社,2004
[6] 上海金属切削技术协会.金属切削手册[M].上海:上海科学技术出版社,1984
作者简介:朱江(1985-09-19),男,汉族,籍贯:辽宁省营口市,当前职务:金工实训员,当前职称:机械工程师,学历:本科,研究方向:机械自动化 机床类

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



