青岛黄海学院 山东 青岛 266427
摘要:设计了一种管道内壁清洁车,整体由移动功能模块、清洁功能模块、控制功能模块三大功能模块构成。管道内壁清洁车由数字摄像头获取管道信息,以西门子S7—200PLC为核心控制器,STM32作为辅助控制器进行处理。整体形状为哑铃型,前后均采用三杆支撑且为双驱动设置,在保证了机体稳定性的同时,使机动性提高。高速旋转钻头与旋转式擦洗片在检测到堵塞物时同时启动,保证了管道的清洁程度。机器中部由金属软管波纹管链接,使清洁车更易通过弯曲的管道。
关键词:数字摄像头;三杆支撑;双驱动设置;波纹管
引言
目前关于地下管道的检查、清洁、维修,常采用工程量十分巨大的开挖抽检方法,,不但劳动强度 大、效益低,而且由于随机抽样法经常出现遗漏,因而准确率低、效果并不理想,并且往往在施工方面会妨碍道路交通。因比开发在管道这一特殊环境下工作的管道内壁清洁机器人,使管道得到检查、清洁,提高管道的使用寿命,提高生产效率,减少不必要损失是一个必然方向。该机器主要点为解决特殊管道堵塞与清洁问题,由数字摄像头进行管道的路径监控传输给主控制器或者由外部遥控器进行信号传输进入主控制器进行控制。整体设计为哑铃型,前部包含破坏堵塞物的钻头、前部驱动、支撑三杆,中部包含金属波纹管与清洁海绵片,后部包含支撑三杆、后部驱动、信号接收器。设计在使机器具有清洁功能的同时也具有良好的灵活度,更有利于通过弯曲的管道。本机器主要工作方向为日常管道的维护、清理。
1硬件系统设计
西门子S7—200PLC具有以下优点:A/D、D/A转换精度及转换速度高,一个模拟量模块带3路A/D,1路D/A,A/D、D/A转换速度高;CPU运算速度快,0.37us/位,指令丰富:具有浮点运算、指针运算、中断、通讯响应、PID运算、PWM脉冲输出等功能,存储容量大,充分适应现代控制技术;输入/输出点多、响应快,24输入/16,每点可设置滤波参数,4个20KHz高速计数器,2个高速输出口,适应实时控制的要求;通讯组网能力强,配有2个232/485通讯口,可方便连接232/485/422等通讯接口,适应监控系统的要求;可靠性高,将CPU模块,输入/输出IO模块,通讯模块高度集成一体,简化结构,使用方便。而STM32作为辅助控制器来说,具有与其它STM32微控制器相同的标准接口,外设共用性使其具有极高灵活性,有各种外设操作简单,可以处理模拟以及数字信号,适用于设计的控制电路,还具有低电压和节能两大优点。
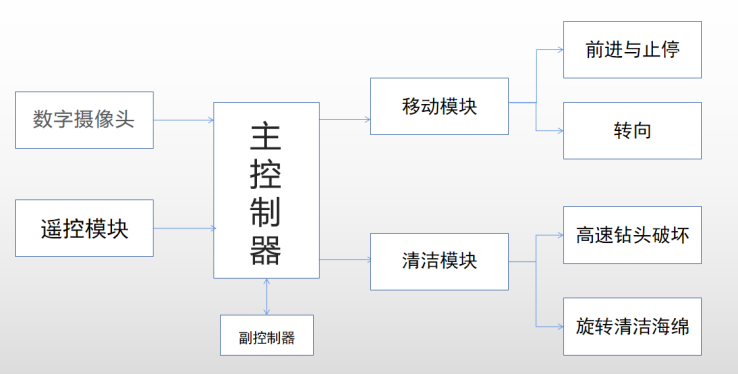
图1硬件系统原理框图
1.1驱动模块
动力模块:六轮成双三角形式,前后两部分一轮各带电机,通过传动齿轮将动力传递到驱动轮上。
支撑模块:一根长带螺纹的金属杆 ,一端连接位于三角板中的电机上,另一端与带螺纹孔的三角板连接,通过电机携带螺纹杆旋转改变机械在管道内的支撑大小。
连接模块:机器由前后两端两大模块组成,中间由金属软管波纹管进行连接。
1.2清洁模块
高速旋转钻头:位于机体前端的动力模块,用于破坏堵塞物。
旋转式擦洗片:位于机体中端的连接模块,在对管道擦洗功能进行设计时,一方面考虑了对擦洗距离和擦洗摩擦力的要求另一方面又考虑了管道口径对尺寸上带来的限制,应用弹性材料。
1.3控制模块
自动模块:通过提前设定好的程序,电源开启后进入管道,通过触感装置机械自动调整驱动轮间距,然后前进。机器前端探头,检测出堵塞物后,驱动轮停止且进行刹车,钻头启动破坏堵塞物,驱动轮启动,由清洁片对堵塞物在管道内壁残留清洁。
遥控模块:通过遥控监视器,切换界面,选择更改清洁车的行动路径。
2 软件系统设计
2.1正常运行中的清洁车可以自行工作,将信号区域内的管道疏通。
2.2操控者可根据遥控监视器,切换界面,选择清洁车的行动路径。

图4 机器工作流程图
3 结论
目前,管道的检测和维护多采用管道机器人来进行。管道机器人是-种可沿管道内壁行走的机械,它可以携带一种或多种传感器及操作装置(如CCD摄像机、位置和姿态传感器、超声传感器、涡流传
感器、管道清理装置、管道裂纹及管道接口焊接装置、防腐喷涂装置、简单的操作机械手等),在操作人员的控制下进行一系列的管道检测维修作业。一个完整的管道机器人系统,应由移动载体(行走机构)、管道内部环境识别检测系统、信号传递和动力传输系统及控制系统组成,其中移动载体是管道检测移动机器人的核心部分。管道检测机器人的工作空间是复杂、封闭的各种管道,包括水平直管、各角度弯管、斜坡管、垂直管以及变径管接口等,它的运行距离一般也较长。纵观上述国内外管道机器人的研究状况可见,要最终实现管道在线检测这一宗旨, 首先在以下几个方面要有所突破。(1) 移动机构移动机构决定管道机器人的行走方式。从目前的行走方式来看,振动式和冲击式适合于刚性管壁环境下应用,具有柔弹性的蠕动机构适合于在柔性管壁环境下应用,而具有多足的管道机器人则有更好的管道适应能力。(2) 高度自治的控制系统:管道机器人要完成检测、维修作业,自身定位及环境的识别能力是关键,开发机器人视觉系统,提高图像处理速度,采用神经网络及人工智能等先进的理论来解决机器人控制系统的高度自治问题是极具吸引力的,也是机器人自主进行工作的关键。随着科技的进步,相信管道会在生活中拥有更加重要的地位。届时,关于管道的日常维护工作将会逐步完善,管道清洁机器会有更加广阔的前景。
参考文献
[1]孙涛.基于超声波传感器的工业机器人遗传算法避障策略设计研究[J].科学技术创新,2020(31):88-89.
[2]曹励龄.基于S7-200PLC的三自由度机械手控制系统设计[J].农家参谋,2020(24):202.
[3]季俊,蔡锦达.基于STM32的制管机人机界面系统[J].轻工机械,2020,38(06):68-71+76.
该项目由青岛黄海学院校级国创项目《管道内壁清洁机器》(X202013320085)支持。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



