广东冠能电力科技发展有限公司 广东佛山 528000
摘要:为了提高配电网线供电可靠性,降低配电网线路对树木放电引起的火灾或者人身触电事故。本文研制开发了一种安全经济的可在10kV带电线路上实施树障清除的机器人装置,其具有集成化的树木清除模块及行走模块、升降模块,树障清除模块,能适应配电网线路现场树障清除的施工要求,实现自动上下导线并无需高空作业配合。利用自升降机构,将机器人挂接在导线上,使机器人能沿着导线自由行走至树障区,启动树障清除装置即可对树木进行切割,完成树障清除的目的,可有效降低树木生长对运行线路带来的不利影响。研发的机器人轻巧便携,在配电网系统中的具有广阔的市场应用前景。
关键词:配电网;树障;机器人
0 引言
在线路保护区内,威胁到电力线路安全运行的树木,称为“树障”。树障对线路的安全运行造成较大影响,轻则容易引起线路跳闸,重则可能造成线路断线,更有甚者造成人员伤亡事故。
对树障进行砍伐或修剪是预防树障事故最有效的手段之一,目前普遍采用人工方式,采用人工对树障进行砍伐或修剪存在作业耗时时间长、劳动强度大、人工成本高等问题;对于高度较高的树木进行修剪时,运维人员作业时需要借助高空作业车进行修剪,对于不满足安全距离要求的,还需要安排相关线路停电,不仅存在较大作业安全风险,而且影响了供电可靠性。随着社会经济的发展,对供电线路安全运行和供电可靠性 的要求越来越高,线树矛盾问题也越来越突出,必需有更加有效的解决办法。
低碳环保、碳中和以及可再生能源概念的提出,我国对环境的保护力度越来越大,砍伐树木的审批流程也越加严格,特别是北方地区更为显著。本文提出了一种利用自牵引卷扬机构,配合机器人顶部绕轴旋转的行走模块,实现机器人自动上线挂线的方法,解决了现有技术中需要人工攀爬或者通过大型工器具辅助安装机器人的问题。研发的机器人只需挂载在配电网线路的最下相即可,适合10kV配电网各种作业场景,提升了树障清除机器人的应用范围;通过对机器人紧凑化结构设计、外壳绝缘化、电磁兼容优化等工作,研发的机器人适应配电网带电作业,运行安全稳定。
11 机器人结构设计
1.1 总体构成
10kV架空线路树障清除机器人,由机器人上机、机器人下机、可伸缩连接架、电锯、控制装置、电源模块等组成。主要针对10kV架空线路线行下的树障问题,能够实现在10kV架空线路不停电的情况下,对线路线行下的树障进行修剪。确保线路和树障之间保持足够的安全距离,提高树障清除工作的安全和效率。采用模块化设计,便于运输和安装。其结构图如下:
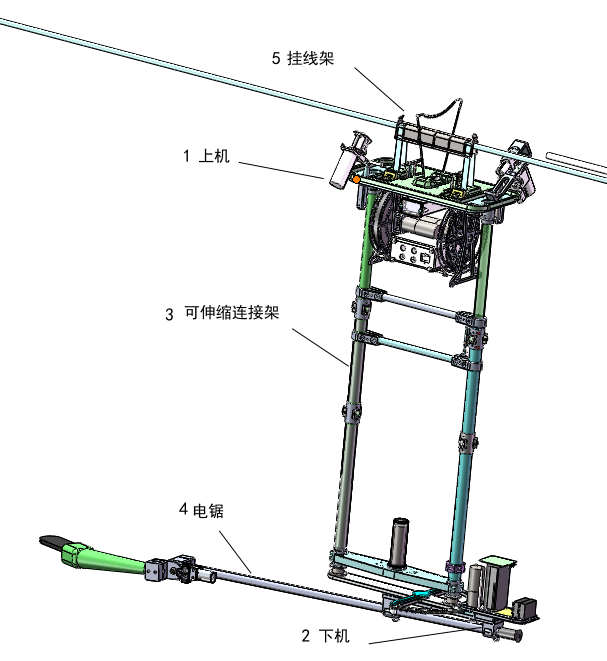
1、上机 2、下机 3、可伸缩连接架 4、电锯 5、挂线架(辅助上线用)
图1 机器人结构图
1.2 关键部件设计和关键技术
1.2.1 机器人上机
上机由行走机构、卷扬升降机构、电动推杆、控制箱、摄像头、等电位装置及上线到位传感器等主要部件组成。行走机构主要由行走轮及其轮架构成,采用双驱动设计,行走轮内有电机,可带动行走轮行走。行走轮上设置有电动推杆,可以控制行走轮沿着转轴旋转,配合卷扬升降装置、等电位装置及上线到位传感器实现在带电线路上自动上下线。轮架上还设计了到位锁杆,可防止机器人受外力影响脱离导线。
利
图2 机器人上机
用“无人机抛线法”将小绝缘绳穿过导线,再用小绝缘绳拉绝缘带至穿过导线,并到达地面,绝缘带穿过固定卡槽,锁紧,使机器能沿着绝缘带自牵引上升、下降。在机器人本体上安装有姿态调整装置,可实时检测机器人本体的水平度,并将数值传输给控制系统,通过实时控制各卷绳机构电机的转速,可使设备在整个提升或下降过程中始终保持水平状态。
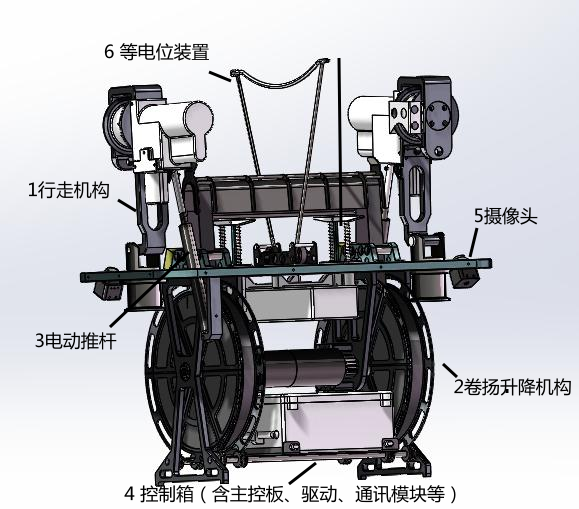
1、行走机构 2、卷扬升降机构 3、电动推杆 4、控制箱(含主控板、驱动、通讯模块等)
5、摄像头 6、等电位装置
图2 机器人上机
1.2.2 机器人下机
机器人下机包含有下机独立控制箱(含电源、驱动、通讯等)、旋转动力电机、旋转摆动机构、旋转到位感应开关、快拆电锯管夹、可伸缩连接架接头等。受作业环境的制约,在设计时需要考虑上、下机的绝缘,所以在下机设计时,需要增加独立的电源及控制系统,通过下机与上级通讯的桥接,将控制型号发送到地面端控制器上。下机的主要功能是实现电锯的180度水平旋转以及电锯的供电及控制。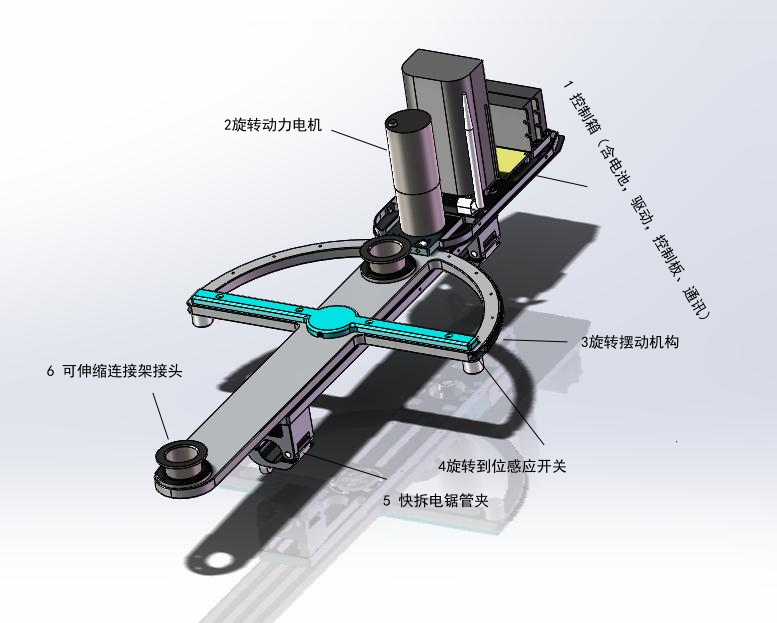
1、控制箱(含主控板、驱动、通讯模块等)2、旋转动力电机 3、旋转摆动机构 4、旋转到位感应开关 5、快拆电锯管夹 6、可伸缩连接架接头
图3 机器人下机
1.2.3 可伸缩连接架
可伸缩连接架的主要功能用于连接机器人上、下机,并实现上、下机的电气绝缘,同时能够实现垂直面的上下伸缩,增加树障清除的范围及应用场景。连接架包含绝缘固定节、可伸缩节、上机连接头、下机连接头、伸缩动力电机以及磁感应开关。伸缩动力电机通过转盘,绝缘绳实现上升,再利用下机的重量实现下降功能。另在管的内部增设保险绳,确保上、下机连接的安全可靠性。
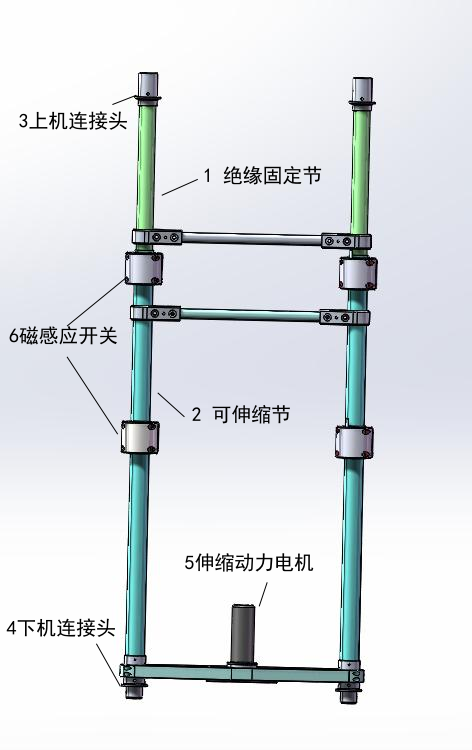
1、绝缘固定节 2、可伸缩节 3、上机连接头 4、下机连接头 5、伸缩动力电机 6、磁感应开关
图4 可伸缩连接架
1.2.4电锯
电锯主要用于对树木的清除,经过测试,采用链锯能有效提高砍树效率,对电锯内部供电及控制进行改进,使之匹配机器人下机的控制电路,且在电锯前段设计垂直方向的旋转功能,能够适应更多树木的生长情况,有效提高现场作业效率。
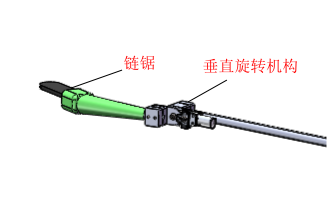
1、链锯 2、垂直旋转机构
图5 机器人电锯
1.2.5带电接入及电磁兼容设计
(1)带电接入
配电网正常运行时最高电压为线电压,为安全起见,设计的机器人绝缘外壳可对机器人本体进行良好包覆,且可耐受线电压,满足带电作业要求。上、下机的电气隔离,能有效防止线路对地或者对树木放电。
机器人采用等电位法作业,带电作业时机器人上机与高压导线连通。
利用电位转移棒出入高压电场,设计合适的电位棒长度,使得机器人上机本体最大电场强度<空气零界场强25kV/cm。
当机器人进入高电场时,电位棒先与导线接触,退出高电位时反之,降低高压脉冲放电对控制系统带来的电磁干扰。
(2)电磁兼容
机器人本体控制电路部分采用电场、磁场的双重屏蔽。采用坡莫合金材料,同时起到电场屏蔽和磁场屏蔽作用。
优化硬件电路设计,提升硬件电路抗电磁干扰性能。(电源的高、低频滤波;电源地、数模地、通信地分地处理;数字与模拟线、高速线和低速线分离排布等)。
1.2.6 图像监控模块
三个摄像头分别布置在设备的上方、前方、下方,用于监控机器人挂接情况和机器人行走前方树木情况以及电锯摆动位置,图像经图传传输到地面端。
1.2.7通讯系统设计
为保证作业安全,地面控制系统的指令需实施传达,延迟应尽可能小。
选取图数控一体无线传输系统,采用H.265/H.264视频编码和OFDM调制技术,时延低,清晰度高。由于电力系统运行时主要频带在50hZ~MhZ之间,两者非同频,可尽可能降低电磁干扰。
通信系统功能包括:接收及分析执行通信指令,进而实现远端无线实时控制,控制机器人机构的电机使其进行作业;检测机器人的电量、姿态、限位传感器更新系统状态信息,并通过无线串口把系统状态信息返回到地面端。
2 树障清除机器人的应用
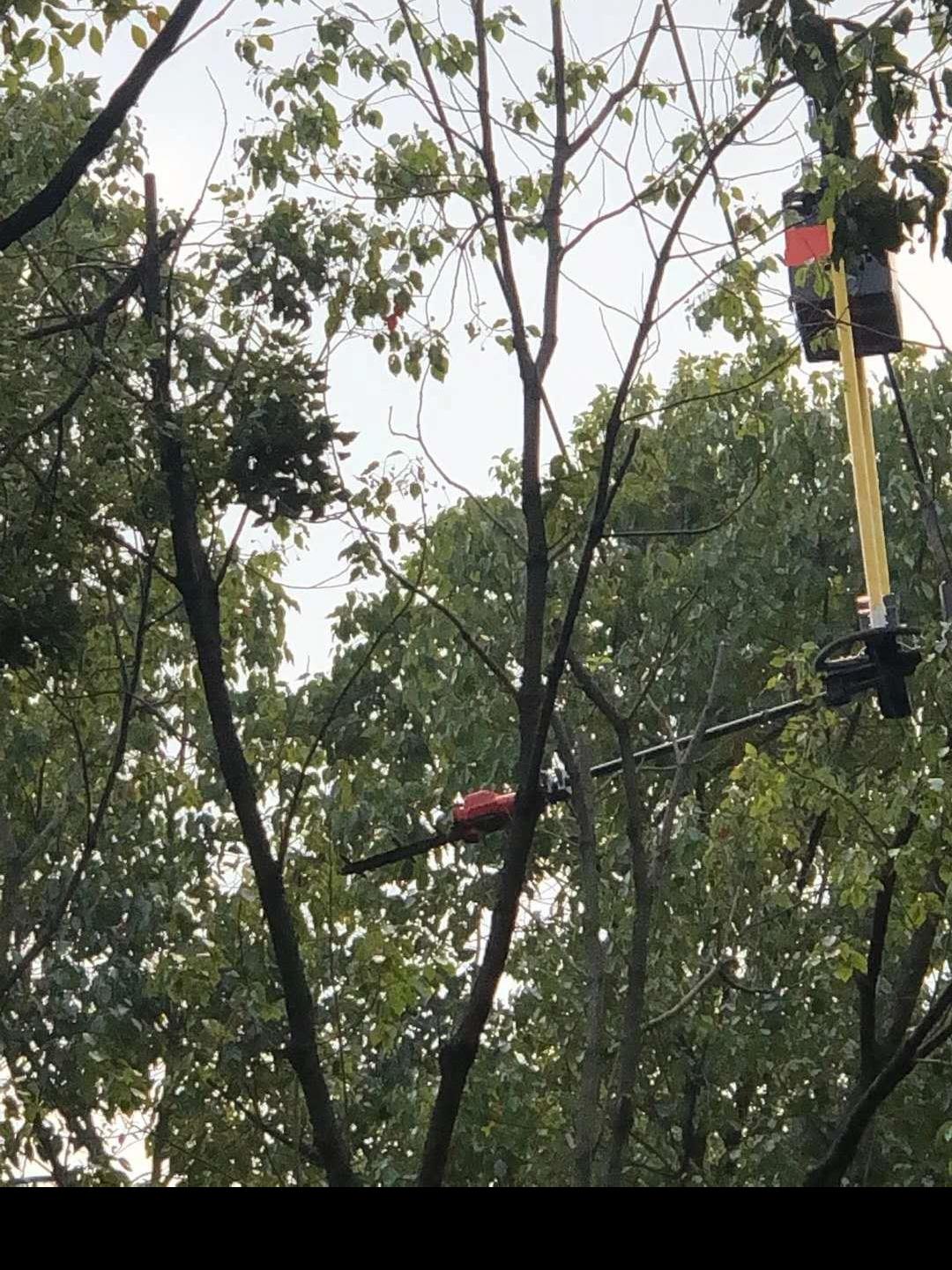
机器人带电清除树障施工流程如下:
(1)绝缘绳挂载 | |
(3)行走并涂覆 | |
图6 树障清除机器人实际应用场景
完成施工前准备工作后,首先通过无人机,将专用绝缘带悬挂至相应的10kV架空线路上,机器人利用上线机构通过绝缘带,自动上升至导线上,随后,机器人行走机构导线,沿导线前后自由行走。
开展树障清除作业时,机器人沿着导线前行,并启动清障 装置,对导线下树障进行清除。随着机器人行进,在导线的垂直范围、水平范围内形成一条安全距离满足要求的电线运行空间通道。
完成所有清障后,机器人再次通过上下线机构,自动下降至地面,结束整个作业过程。
参考文献 References
A mobile robot for inspection of power transmission lines. Sawada, J,Kusumoto, K,Maikawa, Y,Munakata, T,Ishikawa, Y. Power Delivery, IEEE Transactions on . 1991.
Robotics:growing maintenance option for utilities. Greg Paula. Electrical World . 1989.
An inspection robot for feeder cables-snake like motion control. NAKAMURA H,SHIMADA T,KOBAVASHI H. International Conference on Industrial Electronics Control,Instrumentation,and Automation . 1992.
Expliner-ro-bot for inspection of transmission lines. Paulo D,Michele G,Kensuke T,et al. 2008IEEE International Conference on Robotics and Auto-mation . 2008.
Expliner-from prototype towards a practical robot for inspection of high-voltage lines. PAULO D,MICHELE G. International conference on aplied robotics for the power industry . 2010.
王智卜,王文娜,朱俊栋,等.绝缘护套在农网线路局部绝缘化防护中的应用[J].电力科学与工程,2015,31(5):59-65.
张叶林. 农配网的绝缘化改造[J].农村电气化,2013,( 6) : 14..
王立志 ,张峰源,等.提高10kV架空线路运行可靠性的新方法[J].农村电气化,2015,11(3):9-10.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号




 (2)牵引上线
(2)牵引上线
 (4)树障清除
(4)树障清除