宁波财经学院 宁波 浙江 315000
摘要:本文主要研究内容是一种路灯灯罩清洁机器人,在国内面对如此庞大的路灯市场,对其进行怎么样的清洗也就成了一大难题。面对高而危险的路灯,我们迫切需要一个路灯灯罩清洁机器人来帮我们清洗路灯灯罩。而我们研究的目的就是设计一套完整的路灯清洁机器人,通过清洁装置、回转装置、爬行装置来确定灯的位置,实现清洁的整一个过程。
关键词:路灯灯罩清洁;机器人;机械结构
随着当前社会的发展,科技的不断进步,路灯在我们的生活中变得不可或缺,路灯为我们在夜间出行提供了极大的方便,但路灯建设在外界环境中,长时间下来路灯灯罩会由于外界环境的因素而沾染灰尘,吸引虫子留下不明物等,因此路灯的照明度会受到影响。
路灯的照明度不够,不能起到其本身的作用,特别是在阴雨天气,由于其照明度不够,就会存在很大的安全隐患,特别是在车水马龙的当代,路灯就显得格外重要,它更是我们安全的保障。而且路灯一般会很高,在一些设施不完善的地方清洗起来十分不便,所以本文设计了一种路灯灯罩清洁机器人,根据攀爬特性,针对不同截面形状的灯杆的小型机器设备,能够实现跨步距离可控的自主连续攀爬。可方便的对路灯灯罩进行清洗,可以大大的降低人工的投入和给工人清洁时带来的安全隐患。
2 路灯灯罩清洁机器人的工作原理
该路灯灯罩清洁机器人利用两端的机械爪,运用传感器对灯杆进行抓附(面对灯杆粗大的情况,也可以使用电磁铁对其进行吸附),并运用各个关节的运动,向上进行跨步式的爬行。在遇到障碍物时,也能完美的跨越过去,通过拐点时,也可以轻而易举的通过,停留在灯罩附近,对其进行清洁操作。清洁操作分为两部分,第一部分是对准路灯灯罩,对其喷射洗涤剂和水,将其表面的污渍清洗干净;第二个部分是对灯罩表面进行擦拭,以免后续沾染上新的灰尘。操作完毕后即可原路返回,对下一个路灯进行同样的操作。
3 路灯灯罩清洁机器人主要构成
3.1 清洁装置
清洁装置是路灯灯罩清洁机器人的执行部分,主要用于对灯罩进行清洗与擦拭。我们设计的这款装置,水箱与连杆相结合,大大的缩小了其体积,使得机器人变得更加的灵活,本文设计的清洁装置具有如下两个功能:
清洗:将灯罩表面的污渍冲洗干净。运用气压式喷射,对水进行雾化处理,使得水珠变得更加细腻,更加均匀,避免对灯罩产生损坏;
擦拭:利用机器人的灵活性,运用超细纤维洗涤棉对灯罩表面进行全方面擦拭,避免划伤灯罩,同时灯罩也更为干净,起到了更好的照明作用。
3.2 回转装置
回转装置是由转轴和传感器组成,其作用便是连接各个连杆,拥有5个自由度,使机器人更加富有灵活性,主要能够监测来自外部的信息,在路径错误时向操作员显示超出数据,通过轴的远动使机器人有效的规避行程中的像路牌,岔路等障碍。(如图3.2所示)
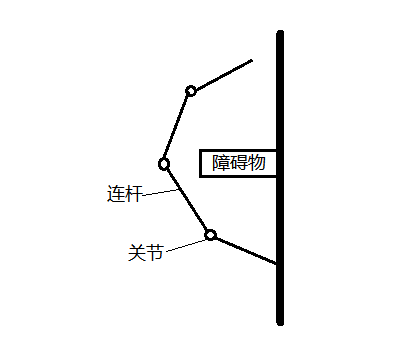
图3.2结构简图
3.3 爬行装置
其主要作用是在爬行时,让机器人与杆之间建立一种连接,再使用传感器对其进行控制,按照图像控制输出的视野范围,输出机械臂产生的关节角度变量,让机器人顺利,安全的到达指定位置。现主要有两种形式来面对不同情况的出现:
夹持型机械爪:面对截面小的路灯杆,则可利用伺服电机掌握握紧力的大小 ,牢牢握紧路灯杆,向上进行爬行,所以,其稳定性也相对有所保障(如图3.3所示)。其结构是利用关节的灵活性,来控制它的动作范围与力度。
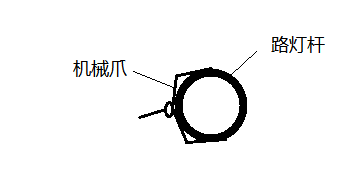
图3.3机械爪简图
吸附型机械爪:运用电磁铁的技术,可以使其结构变得更加简单,灵活多变。我们可以利用电磁铁的磁性有无可以用通、断电流控制,用电流的大小控制它的吸附能力,主要用于截面大,具有磁性的路灯杆。
4 前景分析
目前,研究的攀爬机器人具有的缺陷主要有尺寸相对庞大,动作缓慢、有的只能应用于金属表面或者玻璃表面的攀爬、还有的就是对桁架的截面形状有一定的要求等,一但换了接触材料,改变截面形状和大小就无法进行下一步的操作。其次,面对其它的清洗方式优势也是十分的明显:第一,人工带着清洁装置爬杆进行作业,存在很大的安全隐患,再加上马路上车流量庞大,很容易对人造成伤害;第二,使用大型的云梯车对其进行清理,操作复杂,成本价高,长期使用还会造成交通的拥堵;第三,路灯常年被日光暴晒和风吹雨打,难免会出现一些问题,特别是漏电问题,如果清洁工人未及时发现,很容易会对他的生命安全造成影响。
5 结论
随着科技的不断进步,一条条宽大的公路扑面而来,在这公路之上矗立起众多的电线杆、路灯杆等高层杆状建筑,随着时间的推移,路灯在外界因素的影响下,变得模糊不清,一个个清理路灯的浩大任务也随之而来。本文的路灯灯罩清洁机器人就是为了克服这一难题诞生出来,其主要由清洁装置、回转装置、爬行装置构成,运用爬行装置和回转装置进行上下的攀爬,路障的躲避,到达指定位置之后,再用清洁装置对路灯灯罩进行全方面的清洗。此机器人的诞生既方便我们的生活,也可以美化我们的城市。
李海峰.基于solidworks小型路灯清洗装置的三维模型设计[J].中小企业管理与科技(中旬刊),2016(02):238.
刘思南,马凝,杜巧玲.小型自适应翻转攀爬机器人的设计与实现[J].吉林大学学报(信息科学版),2019,37(03):322-331.DOI:10.19292/j.cnki.jdxxp.2019.03.016.
杨书建,侯宇,卢蒙.关节-轮式爬杆机器人多姿态力学模型与稳定性研究[J].机械设计与制造,2020(03):254-257.DOI:10.19356/j.cnki.1001-3997.2020.03.061.
杨峰,马书芳,朱向冰.测量灯罩表面污染程度的电路设计[J].电子设计工程,2013,21(21):107-109.DOI:10.14022/j.cnki.dzsjgc.2013.21.019.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



