绍兴文理学院机械与电气工程学院,浙江绍兴,312000
摘要:本我们通过实验设计了智能植树机器人,通过设计履带运载小车实现在沙地中的行进,融合电子控制技术和网络控制技术,实现自主控制机器人功能,能够及时向使用者反馈植树的情况,实现不同种植树工作方式的智能控制功能,随后根据设定间距开始机械化散点式种植,解放了劳动力,大大提高了植树效率,实现植树的智能化、数字化[[1]]。
关键词:生态环境、植树、机器人、单片机;
1 引言
当前,全球气候变化,尤其是土地荒漠化是人类面临的最严峻的危机之一。我国是世界上受荒漠化影响最为严重的国家之一。我国主导的“一带一路”倡议中的“新丝绸之路经济带”也面临着严峻的荒漠化和生态问题。土地荒漠化,导致很多地区经济发展落后、贫困人口集聚,甚至时常诱发严重的社会和安全问题,已成为制约“一带一路”沿线地区发展与稳定的重要因素。我国西北沙漠化了的土地,在西北风的席卷之下,成为了京津冀老百姓最熟悉的沙尘暴。我国西北地区荒漠化的发展,已经给我国广大荒漠化地区的生态环境、资源、社会经济发展与人民群众的生产生活造成了严重的危害与威胁,甚至危及到周边居民的生存,阻碍着我国的可持续发展。因此,加强对荒漠化的防治对我国促进生态平衡、经济发展有着十分重要的作用。现阶段胡杨苗的种植主要靠原始劳动力,种树人的工作环境极端恶劣,因此急需一种机器人来替代他们的体力劳动[[2]]。
2 系统总体设计方案

图1 系统总体设计方案/系统结构图
2.1 系统硬件结构
1.硬件系统搭建
本系统的硬件平台如下图所示:
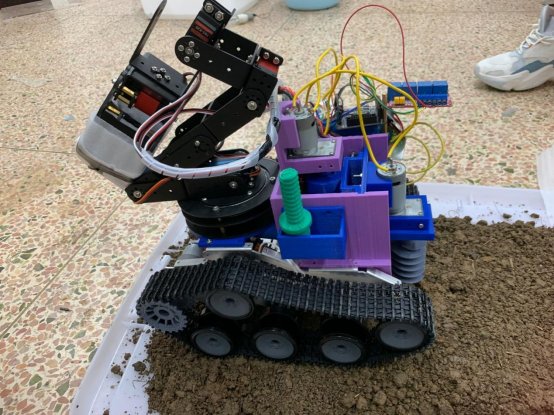
图2 硬件平台图
植树机器人,通过设计履带运载小车实现在沙地中的行进,融合电子控制技术和网络控制技术,实现自主控制机器人功能,能够及时向使用者反馈植树的情况,实现不同种植树工作方式的智能控制功能,当使用者需要完成不同植树任务的时候,只需设定好种树间距,确定好初始挖坑种植位置,机器人会自主规划路线,行进至指定位置,并用特定的机械结构实现钻地挖坑的功能,并通过机械手将树种送入坑洞中,同时履带完成覆土,送水机构及时浇水灌溉,完成一次植树,随后根据设定间距开始机械化散点式种植,解放了劳动力,大大提高了植树效率,实现植树的智能化、数字化。
该机构的挖坑机械结构由一个钻地蜗杆和丝杆,电机带动螺旋蜗杆运动,将土壤松动并带至地面,丝杆上有一个滑块并与钻地蜗杆连接,用程序控制电机带动丝杆转动,滑块可沿机架上下滑动。实现蜗杆钻动的同时向下运动,挖到一定深度后丝杆反向旋转将滑块和蜗杆升至地面,完成挖坑。
2.2 系统软件设计
本系统的软件设计结构图如下:

图3 总体程序流程图
3结论
目前我国植树机器人的研发大多处于试验阶段,由于各种原因尚无法普及,植树设备发展水平低。国外研究机构在植树设备的研究领域尽管已达到了较高的水平,但是所设计开发的设备结构复杂,成本偏高,且部分功能还需进一步完善。
本文基于以上问题,设计了一种基于智能控制的植树机器人。该机器人综合了挖坑、种植、覆土、浇水功能的同时可以实现远端控制,实现一体化机械式植树,大大提高了植树作业的自动化程度及种植效率。
参考文献
[[1]] 马浩钦, 韩肖, 李鑫宇, 林涵, 苏渺. 关于沙漠自动植树机器人的创新设计分析[J]. 中国设备工程, 2021(21): 86-87.
[[2]] 胡振圆, 王路平, 孟逸飞, 王子健. 智能物流小车机械臂系统设计[J]. 科技创新与应用, 2022, 12(02): 63-65.
作者简介:
张宇豪(2001,10),男,汉,浙江台州,绍兴文理学院机械与电气工程学院机械系机械电子工程,学生。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



