(盐城工学院机械优集学院 江苏盐城 224051)
摘要:调查发现,现阶段近海洋污染严重,甚至严重威胁人类和海洋生物的生命。已有的垃圾处理方式和垃圾收集船不能很好地清理近海垃圾,尤其是近海弥漫的油污。所以,针对目前近海垃圾污染严重的普遍问题,设计了一种一体化海滨垃圾处理装置,开发了相应的云梯传送带,垃圾处理与储存装置和水质净化器,并且建立了实物模型来验证了方案的准确性。本设计集云梯传送带、粉碎、压缩、净水于一体,功能完善,能有效解决当前海滨垃圾污染严重、现有打捞方式局限性导致海滨垃圾难以高效打捞的问题,能高效清理垃圾,特别适用于海水浴场或近海海滨。
关键词:一体化;云梯传送带;高效
An integrated waterfront waste treatment device
Yang Chen Kaixuan Xiao Jin Ye
School of Mechanical Engineering & UG, Yancheng Institute of Technology, Yancheng, Jiangsu 224051
Abstract: It is found that at the present stage, near-sea pollution is serious, even seriously threatening the lives of human and marine organisms. The existing garbage disposal methods and commercially available garbage collection vessels cannot clean the offshore garbage well, especially the oil pollution diffused in the offshore. Therefore, in response to the current common problem of serious offshore garbage pollution, an integrated seaside garbage treatment device is designed, and the corresponding ladder conveyor, garbage treatment and storage device and water purifier are developed.,And the real model is established to verify the accuracy of the scheme. The design integrates ladder conveyor belt, crushing, compression and water purification in one, with perfect functions, which can effectively solve the current problem of serious pollution of seashore garbage and the limitation of existing salvage methods that make it difficult to salvage seashore garbage efficiently, and can efficiently clean up garbage, especially suitable for seawater bathing or offshore seashore.
Key words: integration; ladder conveyor belt; high efficiency
随着人类社会的飞速发展,海洋污染问题越来越严重。大型船只的漏油,垃圾被丢弃到海里,大量的垃圾堆积在海岸,给海洋生物的生存和人类的生活环境造成巨大的影响。

图1.1 海洋垃圾使海洋动物受伤或致死
这些堆积的垃圾,对海洋生物造成严重的危害,使很多动物意外死亡。海洋动物也因此意外受伤或死亡,例如海鸟,螃蟹,海龟,鱼类和一些哺乳动物会误食塑料垃圾或被废旧渔网缠绕而受伤或死亡[1~3],如图1.1所示。
此外,海上石油开采,原油泄漏和储存造成的泄露也会一定程度上威胁到海洋生物的安全,需要迫切解决[4]。
由此可见,海洋垃圾对海洋环境的危害十分严重,净化海洋环境刻不容缓。
2.目前海洋垃圾污染的解决方案及创新方案的提出
目前,清理海滨垃圾的主要方式有传统的人工打捞方式和普通的船只打捞方式。在很多地区,采用普通的人工打捞方式,劳动强度大,工作环境恶劣,效率也十分低下
[5]。因此,人工打捞近海垃圾的方式存在缺陷。
普通的船只打捞方式也有很多局限性。传送带通常无法调整、折叠或者调整,或者折叠的范围有限。垃圾通常堆积在船上,缺少高级的垃圾处理储存装置,靠岸后还需要人工或依靠其他机械把垃圾运送上岸。此外,原油泄漏和污染更是屡见不鲜,可是通常很难清理海滨油污,净化水质。因此,普通的船只打捞,垃圾清理的效率也较低。
为此,针对以上问题,本文设计了一种集云梯传送、粉碎、压缩和净水一体化的海滨垃圾处理装置,能有效解决当前海滨垃圾污染严重、提升对垃圾的存储和转运的能力。
3.方案设计与工作原理
为解决上述技术问题,本设计采用了以下技术方案[6]:
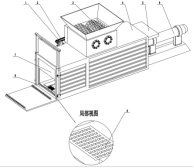
一体化海滨垃圾处理装置如图3.1所示,包括云梯传送带,垃圾处理储存部分,水质净化器三部分。云梯传送带负责垃圾收集输送。垃圾处理储存部分负责垃圾的粉碎、压缩和存储处理。水质净化器负责吸收海面油污。在船体周围加上了一圈挡板,以确保在装置运行部过程中水不进入船舱。
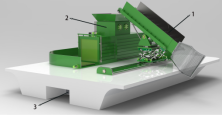
1---传送带装置 2---垃圾处理与储存装置
3---水质净化装置
图3.1 一体化海滨垃圾处理装置结构图
3.1 云梯传送带
云梯传送带包括对垃圾进行收集的网状收集板、将垃圾输入粉碎压缩机并将垃圾输出送上岸的传送带节和多个用于传送带节的调整与折叠的可动机构,其结构如图3.2所示。
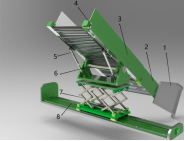
1-网状收集板2-下传送带3-上传送带
4-平移机构 5-变角度机构6-旋转机构
7-升降机构 8-移动机构
图3.2 云梯传送带部分结构组成图
考虑到洋流的影响,从船的侧面收集垃圾效率更高,且安装在侧面和安装在前面相比,传送带更不容易受到破坏。故将传送带安装在船体侧面。一体化海滨垃圾处理装置中,在上传送带节内侧面上设计传送带平移滑道,以确保折叠的功能。在上下传送带节上添加一定高度的遮板以防垃圾从传送带节上滑落。为实现垃圾的初步滤水,首先在下传送带节上添加振动电机,其次去除下传送带节上右侧前半段挡板并在下传送带节表面添加一定数量的孔。
1--振动电机2--从动轮3--同步带4--主动轮
图3.3 云梯传送带平移原理——平移机构


图3.4 变角度-旋转-升降机构运动简图
图3.5 滑动机构运动简图
多个可动机构包括:
平移机构,如图3.3所示,其用于传送带节像云梯一样地折叠和展开,布置在传送带节侧面,由平移用电机、主动轮、从动轮、同步带和将同步带下边固定的同步带架组成。利用平移机构,传送带节在必要的时候像云梯一样平移展开,在非必要的时候折叠。
变角度机构,旋转机构与升降机构,如图3.4所示利用这三个机构可以调节传送带的收集范围,使其收集到船体周围不同角度,不同方向以及水下不同深度处的垃圾。
滑动机构,如图3.5所示,通过滑动机构,云梯传送带来到双向移动输送带的垃圾出口处,处理好的垃圾又通过云梯传送带输出装置,送上岸。
3.2 垃圾处理与储存部分
垃圾处理储存部分如图3.6所示,包括粉碎压缩机和双向移动输送带,双向移动输送带可以起到暂时储存垃圾的作用,也可以在垃圾满后反向转动将垃圾送出。
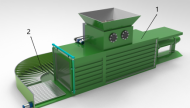
1--粉碎压缩机,2---双向移动输送带
图3.6垃圾处理与储存部分结构图
粉碎压缩机结构如图3.7所示,粉碎压缩机箱体下部设有排水孔。在粉碎用电机的驱动下,通过带传动带动粉碎辊子工作,实现垃圾的粉碎。设置液压缸,在推力的作用下压板被推出,实现垃圾的压缩。当压板对垃圾的压力达到一定值时,压力传感器作用,粉碎压缩机门打开。
1--粉碎用电机 2---带传动3---粉碎机辊子
4---粉碎压缩机箱体5---压板6---液压缸
7---粉碎压缩机门8---排水孔
图3.7 粉碎压缩机结构图
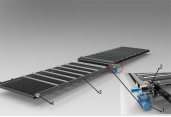
双向移动输送带结构如图3.6所示。双向移动输送带用于处理后垃圾的暂时储存,若上面垃圾过多需要将部分垃圾输出时,双向转动电机反转,将垃圾送到垃圾出口处,并配合云梯传送带将垃圾送上岸,其过程如图3.8所示。

图3.8 垃圾卸载上岸过程图
3.3 水质净化器
水质净化器结构如图3.9所示,安装在整个装置底部中间靠后的位置,由6个稻草辊子、6根稻草辊子轴、2块水质净化器筛网、3块水质净化器挡板等部分组成。净化器起到吸附水中油污,净化水质的作用。
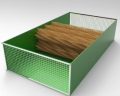
图3.6 水质净化装置图
4.一体化海滨垃圾处理装置技术参数
4.1 关于装置的重要参数
一体化海滨垃圾处理装置由云梯传送带,垃圾处理储存部分,水质净化器等部分组成,其各部分质量和可容纳干垃圾的相关技术经过公式计算,得到的参数如表4.1所示[7]。
表4.1装置各部分质量及可容垃圾量
总体 | 76165kg |
船体 | 59043kg |
云梯传送带 | 2549kg |
垃圾处理与储存部分 | 14435kg |
水质净化器(连挡板) | 138kg |
可容纳干垃圾 | 2t |
4.2 平移机构滑轮组同步带技术参数
平移机构中,滑轮组通过同步带传动进行传动,因此同步带的参数对于平移运动至关重要。现将其技术参数列表,如表4.2所示。
表4.2 平移机构同步带技术参数表
带的类型 | H型 |
带轮节圆直径 | 121.27mm |
带速 | 0.5m/s |
带的中心距 | 479mm |
节线上齿数 | 200 |
小带轮啮合齿数 | 15 |
带宽 | 43.90mm |
5.一体化海滨垃圾处理装置的模型建立

图5.1 慧鱼实物模型图
在SolidWorks上进行三维造型后,为验证其的可靠性,采用慧鱼工具箱拼接出了实物模型,并且利用慧鱼的编程系统进行编程使其运转[8~9]。
拼接实物模型的过程中,由于慧鱼工具箱的条件限制,将其中一些机构进行了替换,但运动原理依旧不变。最终的慧鱼模型如图5.1所示。控制该模型运转的流程图如图5.2所示。
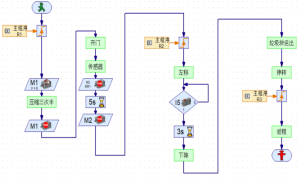
图5.2 慧鱼模型工作流程图
云梯传送带中,升降机构和滑动机构改用蜗杆代替,变角度机构改用气动元件实现,其他部分不变。慧鱼模型中的云梯传送带,可以完成垃圾收集,输入和输出等各种既定功能。
垃圾处理储存部分,压缩改用蜗杆传动实现,如图5.3所示。

图5.3 压缩方式

1--双向移动输送带A 2--双向移动输送带B 3--超声波检测仪 4--气动元件
图5.4 慧鱼模型中的双向移动输送带

图5.5 慧鱼模型中垃圾正在输送带上转弯
双向移动输送带,用两条同一平面内相互垂直的输送带,以及超声波检测装置和气动元件来实现转弯,如图5.4所示。从输送带B向输送带A的转弯可以很方便的完成,但是,输送带A向B转弯不易完成。故考虑在输送带A的尽头添加超声波传感器,并且在旁边添加气动装置辅助。如图5.5所示,当超声波传感器检测到垃圾时,会发出指示信号,同时,一旁的气动元件作用,将垃圾推上输送带B。控制垃圾转弯的超声波传感器流程图如图5.6所示。

图5.6 垃圾转弯(超声波传感器)流程图
综上,通过慧鱼实物模型,验证了一体化垃圾处理储存装置模型的可靠性。
6.一体化海滨垃圾处理装置的创新点
1.考虑到洋流的影响,开创性地安排在了船的侧面,提高了垃圾回收的效率。
2.通过多个可动机构,可以调整传送带。具体表现在:(1)平移机构实现的平移式折叠,减小了传送带在非工作状态时的空间。(2)变角度、旋转机构便郁收集不同角度和方向处的垃圾。(3)升降机构可以收集水下不同深度处的垃圾。(4)滑动机构对传送带进行调整,可以将处理好的垃圾输出上岸。
3.垃圾处理储存部分粉碎,压缩,垃圾暂存为一体,减少了后续垃圾处理的麻烦。
4.在实际操作中,开创性的将超声波传感器和气动元件相结合,方便了垃圾块的转弯。
5.由天然材料稻草滚子做成的水质净化器可以清理近海油污。
7.设计总结
本设计集云梯传送带、粉碎、压缩、净水于一体,功能完善,并且通过慧鱼实物模型验证了方案的可靠性。一体化海滨垃圾处理装置能有效解决当前海滨垃圾污染严重、现有打捞方式局限性导致海滨垃圾难以高效打捞的问题,特别适用于海水浴场或近海海滨。该装置符合生态环保理念,具有市场开发潜力。
参考文献
[1]赵肖,綦世斌,廖岩,陈清华,黄道建.我国海滩垃圾污染现状及控制对策[J].环境科学研究,2016,29(10):1560-1566.DOI:10.13198/j.issn.1001-6929.2016.10.21.
[2]Fiona Murray ,Phillip Rhys Cowie. Plastic contamination in the decapod crustacean Nephrops norvegicus (Linnaeus, 1758)[J]. Marine Pollution Bulletin,2011,62(6).
[3]Hammer Jort, Kraak Michiel H S, Parsons John R. Plastics in the marine environment: the dark side of a modern gift.[J]. Reviews of environmental contamination and toxicology, 2012,220.
[4]徐丝雨.基于仿生原理的海面油水分离无人
船的设计[J].山东化工,2021,50(09):167-168+170.DOI:10.19319/j. cnki.issn.1008-021x.2021.09.069.
[5]刘烁超,余彦峰,翁杰弟,江锦华,吴伟辉,李湘勤.水面垃圾智能打捞船设计[J].机电设备,2019,36(04):20-23.DOI:10.16443/j.cnki.31-1420.2019.04.005.
[6]朱龙英,黄秀琴.机械原理[M].高等教育出版社,2020
[7]朱龙英,李贵三.机械设计[M].高等教育出版社,2012
[8]臧劲松.程序设计与实践[M].北京:中国铁道出版社有限公司,2019.
[9]景维华.机器人创新设计[M].北京:清华大学出版社,2014.
陈阳,2001.04.20,男,籍贯:江苏省金湖县,学历:盐城工学院本科在读,学校:盐城工学院在读学士,学生,,研究方向:机械设计制造及其自动化

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



