440203199007222435
摘要:在当前配网带电作业机器人得到广泛应用的背景下,为避免斗臂车振动、作业场景多变、光照等因素对其精准作业定位造成影响,本文从配网接引线带电作业入手,提出基于场景语义的自动作业定位方法,以有效避免外部因素对配网带电作业机器人精准作业定位的影响。全新的精准作业定位方式将极大提升配网带电机器人的工作速率,扩大其使用范围,保证数据收集的精确性,降低人为调整对机器人精准作业定位的影响,有效提高其工作质量。
关键词:配网;带电作业机器人;精准作业定位
引言:带电作业可提高整体电力服务水平,可为广大群众提供更加高效、安全的电力资源。从实际情况进行分析,若沿用以往人工带电作业的方式,将会对相关人员的生命健康安全造成严重威胁。为避免发生极为严重的人员伤亡事件,我国积极引进并创新了配网带电作业机器人作业方式,极大降低了人工投入情况。但从实际情况来看,该方式具有一定的使用限制,在精准作业定位等方面存在不足,由此就需要相关技术人员积极开展各类研究活动,有效提升机器人的场景感知、目标识别能力,增强其环境适应性,保证配网带电作业工作的有序推进。
一、配网接引线带电作业
(一)配网带电接引线场景
配网带电作业的优势在于可尽量减少停电检测的时间,保证广大群众的正常用电需要,其中较为常见的配网带电作业就是带电断接引线的工作,其线路排列方式主要可分为水平、三角两种排列方式,引线横档与导线也则分为横、顺排列方式,由此进行组合,则可得到配网带电作业机器人的不同工作情境,如图1。
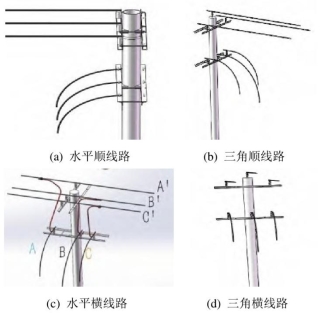
图 1 配网带电作业机器人接引线场景
(二)机器人带电接引线作业流程
在配网带电作业机器人开展作业期间,可保证相关作业人员的生命健康安全,降低风险隐患系数,保证带电作业的标准化、规范化,提高实际工作质量与成效。依据具体工作需要,配网带电作业机器人的作业流程如下。第一,绝缘斗臂车停靠,相关人员需要对作业环境进行观察,并设定作业顺序,选择较为合适的工作线路,保证绝缘斗臂车可安全停靠,并利用支撑腿进行加固,保证机器人稳定性,此时即可开启电源,判断网络及线路连接是否到位。第二,准备工作,相关人员可利用斗臂将机器人移动至待工作区域的正下方,并利用感知定位的方式保证机器人安全进入工作区域。第三,抓取引流线,应扫描引流线位置,并选择引线作为抓取点,利用机械臂将引线抓取到自动接线位置。第四,作业定位,可利用激光雷达扫描技术对三维场景进行数据扫描,并利用机器人自动生成三维点云数据,完成空间模拟重建,采用人机交互的方式保证行线与引线位置的精确定位。第五,剥线,机器人可依据设定程序完成接线机械臂的剥线运动,利用配套装置对其完成拾取、移动、调位、剥线、回收操作。第六,穿线及接线,机器人程序可对引线抓取位置利用工具将其进行移动、夹紧、接线作业。第七,重复以上步骤即可实现多相作业。第八,作业完成,相关人员可将机器人回收至绝缘平台上,回复初始位置[1]。
二、基于场景语义的自动作业定位方法
(一)空间三维立体感知
利用空间三维立体感知技术,可从多角度、全场景实现模型的重建,可有效避免强光对传感器的影响,机器人可利用自带激光雷达进行位置调整,实现多点扫描,减少数据盲点。主要作业流程如图2。
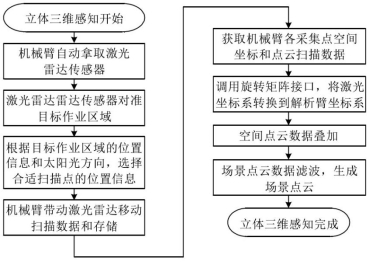
图 2 空间三维立体感知流程
第一,机械臂自动拾取激光雷达传感器,并利用快换结构使其安装在机械臂上,此时仅需利用机械臂坐标系即可进行中心校准。第二,手动调节二者的位置,保证激光雷达中心线始终与作业区域重合。第三,通过实际作业区域信息及阳光照射方向选择左右两个数据采集点,避免阳光直射导致数据采集失效。第四,利用机械臂控制雷达移动,保证从多角度收集相关数据,并完成信息的存储。第五,利用机械臂获取各点信息及扫描数据,利用ROS、欧式变换法得到坐标。第六,将各扫描点信息进行叠加,实现场景转换,并利用滤波技术生成感知点云。
(二)设备对象识别
1.折线识别
第一,最小生成树,可分为Prim及Kruskal两种算法,通过求取最小生成树可判断顶点是否构成回路,具体流程如下。首先提取点云,并确定图论顶点,将点与点之间的距离作为权重,选定起始点,计算其与邻近点之间的距离差值,以非递减顺序存入数组。其次,依序分别判断各点是否可构成回路,即是否可与其他点连接至同一节点上,若是则继续判定,若否则将其他数据清除,仅保留该点归入路径。最后,将该点信息导入统一数组,并将该点作为叶节点,前序点作业父节点,构成树状结构,为后续判断提供参考。
第二,最大关键路径,需要对最小生成树进行深入筛选,保证其提取路径的最小化。将各点向两端进行延伸,计算各路径端点之间的长度,取最大值为代表。
第三,提取中心线,将最小生成树上的路径利用平滑点云的方式得到近似中心线,并利用RANSAC进行直线模拟,找到符合路径需要的直线,此时符合直线模型的点可称为内点,否则称为外点,最终找到内点数量最多的直线模型。
2.电力线路对象识别
为避免激光雷达数据采集不全面、出现噪声边缘等问题,相关技术人员可选择引线识别算法,或基于语义连通性搜索的行线的方式,对作业的行线、引线进行识别、分析,做到精确定位,避免由于人为因素导致的点云边缘离散等问题,具体工作流程如图3。

图 3 设备对象目标识别流程
第一,图像滤波,将融合后的点云图像以离群点滤波算法的方式进行处理。第二,降采样,对滤波后的图像进行体素下采样,并利用VoxelGrid算法提取降采样点云。第三,图像分割,基于无监督聚类算法将图像进行分隔,使其成为多个子块。第四,逼近折现提取,利用各子块获取最小生成树,并取最长路径作为逼近折线,综合中心线减小离散误差。第五,连通域搜索,利用导线的直线特性,使用RANSAC对子块末端进行拟合,通过判断重合度确定其连通性。第六,结果输出,比较行线及引线弯曲度完成对象识别。
(三)设备语义作业定位
为有效解决选点失败及离散问题,相关人员可选择语义作业定位的方式,利用机械臂位置及引线长,自动计算具体工作位置并进行校验,工作流程如图4。

图 4 设备语义作业定位流程
第一,引线自动选择,通过作业臂坐标,利用相关识别设备搜寻最近引线对象。第二,目标选择,以作业臂坐标为参考点,计算其与各行线之间的距离,选择最短行线作为目标行线。第三,坐标计算,利用逼近折现的方式计算其近似长度,并利用间隔取点的方式确定预作业点,判断引线长度与起始点到作业点距离的关系,进而明确具体作业位置。第四,姿态计算,依据作业点获取局部拟合直线,计算其斜率即为行线作业位姿。提取逼近折线,搜索引线末端点坐标,并计算其局部拟合直线斜率即可得到穿线作业位姿[2]。
结论:综上而言,在开展配网带电作业机器人的创新、研究活动期间,相关技术人员可从位置语义自动定位、设备对象识别、空间三维立体感知等方面提升其适应性,有效解决当前机器人带电作业的精准定位问题,并为后续其他带电作业技术能力的提升提供支持,促进配网带电作业机器人技术的进一步发展,提高我国配电行业的先进性、智能性。
参考文献:
[1]刘一涵,纪坤华,傅晓飞,等.配网带电作业机器人技术发展现状述评[J].电力与能源,2019,40(4):446-451,470.
[2]许崇新,赵玉良,赵生传,等.主从式遥操作配网带电作业机器人研究[J].机床与液压,2019,47(23):102-105.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



