(江苏中森建筑设计有限公司,江苏 镇江 212009)
摘要:针对风力发电输出功率波动性大,其装机容量持续增加会对电网频率稳定性产生影响的问题,文章介绍了一种计及各风电机组健康因数的风电系统一次调频策略。该策略指导风电机组依据自身健康状况调整调频出力,在维持一次调频效果的同时,可以减小非健康机组的载荷,降低其状态恶化速率。文章利用了风电机组的状态监测数据进行健康因数的计算,通过附加调频回路进行功率支撑,调频系数基于健康因数自适应地调整。系统采用了自适应模型预测控制(AMPC)算法,达到了提高控制精度的效果,并减小了负载变化引起的功率波动。文章以一个带风电场的两区域仿真系统为例,验证了该策略的有效性。结果表明,该策略在保证一次调频效果的同时降低了非健康风电机组的载荷。
关键词:风电系统;一次调频;健康因数;AMPC
0引 言
风电得益于分布广、建设周期短等优点而发展迅速,且装机容量逐年增长。但由于风电的输出功率是关于风速的函数,具有波动性,因此随着风电在电力系统中的渗透率逐渐提升,其对电网频率稳定性的影响也越来越大[1]。与传统同步发电机相比,变速风力发电机通常以最大功率点跟踪方式运行,并通过电力电子装置与电网连接,其转子转速与电网频率解耦,使整个电力系统的总惯量减小,从而导致电力系统的调频响应能力下降[2,3]。当电力系统供需不平衡时,系统频率产生波动,高风电渗透率系统的频率偏差和变化率会更大。因此,学者们越来越关注于风机提供足够的频率调节能力,以保证电力系统的频率稳定性。
一次调频要求风电机组在频率变化时快速调整有功功率输出。在不同的风力发电机类型中,双馈感应发电机(DFIG)具有有功与无功功率控制更灵活、运行效率更高的特点[4,5],因此基于DFIG的风电机组成为目前市场上应用最广泛的一类机组。针对风电场需向电网提供调频服务的要求,各国学者对包括DFIG在内的风电机组的调频控制策略进行了诸多研究,目前研究中应用较广泛的调频方法大致可分为惯性调频[6-8]、一次调
频[9-11]以及二次调频。J. V. d. Vyver等人[6]研究了变速风电机组惯性响应在不同系数下的调频效果;Yujun Li等人[7]提出了一种在不安装远程通信的情况下利用高压直流电容电压信号指导海上风电机组提供惯性响应的策略;M. Kayikci和J. V. Milanovic[8]则对变流器电流限制以及调频系数对惯性响应的影响进行了研究。Vahid Gholamrezaie等人[9]利用基于多目标的粒子群算法优化调频控制器系数以提高调频效率;Jingjing Zhao等人[10]将风速作为参考因素调节控制参数来实现抑制频率波动的效果;Yingjie Tan等人[11]将恒功率裕度控制策略与恒比例功率裕度控制策略相结合,优化DFIG的一次调频响应。Xiangyu Zhang等人[12]将频率偏差纳入功率跟踪系数的计算中,通过改变功率跟踪曲线使风电机组参与调频。惯性调频和一次调频的响应速率较快,可以在系统频率发生变化的10秒内启动,但是当风电机组转子将蕴含的动能大量释放出来后,后续会吸收部分风能用以恢复转速,这一过程可能导致系统频率的二次跌落。
为了提高调频效果,研究者们会参照同步发电机的下垂特性,采用功率备用控制方法。功率备用控制是指预先控制风电机组从最大功率点调整至次优功率点,留出一定比例的功率裕度作调频备用。功率备用控制能与惯性控制策略相结合,达到既能在系统频率变化瞬间提供有功功率快速支撑,又能在后续提供较长时间的功率支撑的效果[13]。由于功率备用控制的功率裕度存在限制,为充分利用有限的调频功率以及避免调频功率超限,文献[14]提出了变虚拟惯性系数的调频控制策略,而文献[15]提出了变减载系数的调频控制策略,两者均在降低系统频率波动的同时减少了调频功率的损耗。文献[16]设计了风能捕获系数与系统频率偏差的函数,动态调整功率跟踪曲线,优化了调频效果。文献[17]从风电场的整体角度设计调频控制策略,将风电场的风电机组按照所处风速区间进行分组,并设置相应的权重系数,按照对应的权重给各组风机分配调频功率。
以往的大部分研究均不考虑风电场中各风电机组本身的健康状况,这些研究设计的调频策略通常采用固定比例或平均分配的方式来分配风电机组的调频功率,因此风电机组性能下降会影响调频效果,影响电网的稳定性。然而,少有研究涉及到风电机组的健康状况对一次调频效果的影响。
论文主要分为以下几个步骤。首先,对风电系统的调频方法进行了阐述;然后,分析了风电系统的建模和调频控制策略,引入风电机组健康因数,设计基于健康因数动态变化的调频系数函数,基于该函数调整风电机组的调频出力;接下来,介绍了AMPC的控制原理,以机组健康因数为动态约束提高控制精度;最后,在MATLAB/Simulink仿真平台中验证所述策略在保证系统调频效果的同时能够缓解机组状态的恶化。
1 系统建模
风电系统主要由风力机、变速箱、发电机、背靠背变流器、电网组成,如图1所示。

图1 风电系统结构示意图
传统水平风力机的风能转换特性与风能转换系数Cp以及风速v(m/s)相关,由风能转换公式可得,风力机从风中捕获到的机械功率可以表达为:
![]() (1)
(1)
式中,ρa为空气密度(kg/m3),R为风力机叶片半径(m);Pm_rated为额定功率(W),ωr_rated为额定转速(rad/s)。
根据风电机组机械功率与扭矩间的关系,可得风电机组扭矩Tm的表达式为:
 (2)
(2)
式中,λ为风力机叶尖速比,是叶尖旋转线速度与风速的比值。
DFIG是一种绕线型异步发电机,在三相静止坐标系中建模后呈现出强耦合性以及非线性,为了降低DFIG的分析难度,往往通过坐标转换的方式模拟类似直流电机的控制特性。在同步旋转坐标系中对DFIG进行建模,其数学模型为:
在不考虑绕组铁芯的损耗的情况下,DFIG定子向电网输送的有功功率Ps和无功功率Qs的标幺化表达式为:
![]() (3)
(3)
式中,usd,usq分别为DFIG的定子电压在dq坐标系两轴上的分量;isd,isq分别为DFIG的定子电流在dq坐标系两轴上的分量。
文章采用定子磁链定向方式,把dq坐标系的d轴置于定子磁链方向上,且忽略定转子电阻,此时各量均转换至定子磁链参考坐标系下,DFIG的有功功率和无功功率表达式可以转化为:
 (4)
(4)
式中,Ls,Lr,Lm分别为DFIG定子绕组自感,转子绕组自感以及定、转子绕组间的互感;us为定子电压的幅值;ψs为定子磁链的幅值;ψrd,ψrq分别为DFIG的转子磁链在dq坐标系两轴上的分量。
为了用于AMPC控制器的设计,将有功功率与无功功率选作状态变量,将转子电压与转差角速度选作输入变量,可得有功功率和无功功率的状态空间方程:
 (5)
(5)
式中,ωs为转差角速度;urd,urq分别为DFIG的转子电压在dq坐标系两轴上的分量。
机组的电磁转矩可以通过如下表达式来计算:
![]() (6)
(6)
式中,np是机组的极对数;irq为DFIG的转子电流在dq坐标系q轴上的分量。进一步可得电磁转矩的状态空间方程:
 (7)
(7)
2 控制策略设计
在一次调频控制策略的研究中,惯性控制法与功率备用控制法是DFIG参与电力系统一次调频的主要方法。其中,惯性控制法模拟同步发电机惯性响应特性,控制DFIG通过响应系统频率变化率提供调频功率。然而,此类调频方法持续时间短,仅在系统频率变化期间产生有效响应。为了提供更加稳定可靠的调频效果,延长一次调频的持续时间,DFIG需采用功率备用控制法预留出一定的功率裕度。文章综合采用惯性控制法以及结合下垂控制的功率备用控制法实现一次调频功能,方案如图2所示。
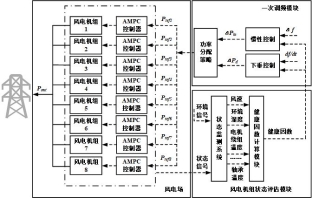
图2 风电系统调频方案示意图
图中,f为系统频率;ΔPin和ΔPd分别为惯性控制和下垂控制基于健康因数提供的调频功率;Prefi为各风电机组的参考功率;Pout为风电场总输出功率。其中,i=1,2,…,8。
当系统频率发生变化时,惯性控制提供的快速有功支撑ΔPin可以由一个关于频率变化率的函数得到:
![]() (8)
(8)
式中,Kin为惯性系数;df/dt表示频率变化率。根据DFIG风电机组的转子动能控制原理,惯性系数通常取值为风力机惯量的两倍,文中则基于机组健康因数实现动态调整。
功率备用控制法可结合下垂控制,模拟同步发电机的功-频静态特性。下垂控制提供的额外有功支撑ΔPd可以由一个关于频率偏差的函数得到:
![]() (9)
(9)
式中,Kd为下垂系数;Δf表示频率偏差。下垂系数的取值受风速、功率裕度影响,在低于额定风速时,风速越大,功率裕度越大,则下垂系数的可选范围越大;而在高于额定风速时,超速控制的功率备用效果会下降,需搭配变桨距角控制;文中下垂系数基于机组健康因数实现适应性调整。文章为比较不同风速下风电系统的调频效果,预设惯性系数为风力机总惯量的2倍,下垂系数为低风速条件下的可选值,以此为基础进行调整。
当风电系统采用上述策略进行一次调频时,风电机组的扭矩表达式为:
 (10)
(10)
其中Tm_res、Cp_res、λres、Pm_res、ωr_res分别为功率备用控制模式下风电机组的扭矩、风能转换系数、叶尖速比、额定功率以及额定转速。文中Cp_res取值为0.432,λres取值为9.897。
在陆上与海上风电场中,风电机组通常工作在恶劣的环境中,其发电性能和服役寿命受到极大的影响,因此风电机组的健康状态是进行更加合理控制的关键参数之一,有必要进行监测。风电机组本身也是一个复杂的系统,文章定义健康因数来描述风电机组的健康状态,采集机组运行时间、齿轮箱温度、轴承温度、风速、环境湿度等数据进行计算。健康因数能够指导系统优化功率分配,从而达到降低非健康风电机组的载荷,延长其使用寿命的效果。
图2中引入了8台风电机组,假设其中有m台非健康机组。定义健康因数HC(0≤Hc≤1)描述风电机组的健康程度,其中,HC为1表示机组健康;0<HC<1表示机组非健康,并存在状态继续恶化的趋势;HC为0表示机组故障。健康因数HC可参考文献[18]进行计算。当发生电力系统功率供需不平衡导致系统频率下降的事件时,由系统相应模块得到频率偏差Δf及变化率df/dt,并通过附加调频回路计算得到各风电机组基于变调频系数的调频功率。风电机组的输出功率参考值Poi*的表达式如下:
对于非健康机组(1≤i≤m),输出功率为:
![]() (11)
(11)
对于非健康机组(m+1≤i≤8),输出功率为:
![]() (12)
(12)
式中,HCi为第i台风电机组的健康因数,ηi、μi分别为基于机组健康因数调整后的惯性系数与下垂系数,Pei*为风力机初始参考功率。ηi、μi与HCi的关系式根据系统实际参数进行拟合设计。
从风电机组的角度来说,惯性控制法在系统频率变化的前期为机组提供快速功率支撑,结合下垂控制的功率备用控制法在系统频率存在偏差的整个阶段提供持续有效的功率支撑,避免机组转子转速恢复时可能引起的频率二次下跌问题。同时,基于机组健康因数变化的调频系数,减小了非健康机组的调频压力。从风电场层面来看,该功率分配策略将非健康风电机组的部分发电及调频任务以调频系数动态变化的方式交由健康机组承担,并控制健康机组的输出功率在可承担范围内,在保证风电系统稳定运行的同时降低了非健康风电机组的载荷负担。
3 AMPC设计
文章设计了一种基于风电机组健康因数的AMPC控制器,控制DFIG的输出功率跟随参考功率。模型预测控制(MPC)算法基于滚动时域原理处理固定时间区间内的局部最优控制问题,根据有限时域内优化指标求解系统控制序列并提取首组序列作用于实际模型,并在下一时间区间重复进行,使系统输出以最佳路径达到目标值[19,20]。MPC的主要优点在于采用多步预测、滚动优化、反馈校正三大核心控制策略实现对非线性时变信号进行控制,鲁棒性强,能够降低系统不确定性[21]。
3.1 MPC控制器的建模
预测模型的建立是MPC控制器设计流程的关键步骤之一。根据第一节分析,风电机组的状态空间模型可以表达为:
 (13)
(13)
式中,k为系统采样时刻;Ad、Bd、Cd为风电机组离散状态空间方程中的系数矩阵。
![]() (14)
(14)
![]() (15)
(15)
![]() (16)
(16)
3.2 AMPC控制策略
优化控制问题可以使用基于风电场目标的成本函数来实现。定义输出偏差向量∆y=y(k+i│k)-yref(k+i),其中yref(k+i)表示第(k+i)时刻参考输出向量,则各时间区间内优化控制的总成本函数CF为:
 (17)
(17)
式中,CF1、CF2分别为输出偏差向量与输入向量的代价函数;SY、RU分别为各自的权重矩阵;Np为预测时域的长度;Nc为控制时域的长度。代价函数CF1对输出向量y偏离参考目标yref进行惩罚,使其加速向参考目标靠近;代价函数CF2则是反映输入向量的变化,指导其以最优的路径达到目标值。
在大部分研究中,风电机组健康状况的影响被忽略不计,各风电机组的健康因数默认设置为一个相同的常数。文章则提出了一种基于机组健康因数计算各变量动态约束的控制方案,以降低非健康机组的载荷。定义电磁转矩T及其变化量ΔT的约束为:
 (18)
(18)
式中,、T、、ΔT分别为风电机组电磁转矩的上下限与转矩变化量的上下限。从式(7)可以看出,第一项比第二项小得多,Ṫ与vrq近似成正相关关系。因此,变量vrq采用基于风电机组健康因数的动态约束:
![]() (19)
(19)
式中,rq、vrq分别为转子q轴电压的上下限值。同时,引入松弛因子设置输出向量y以及变量vrd的软约束:
![]() (20)
(20)
式中,ε(ε>0)为松弛因子;、y分别为输出向量的上下限;rd、vrd分别为转子q轴电压的上下限值;γBy和γTy为输出向量y的松弛因子权重系数;γBv和γTv为vrd的松弛因子权重系数。引入松弛因子后,代价函数指导控制器在可行解与松弛度之间找到一个平衡点,从而增加了系统的鲁棒性。
为了避免风电机组功率、电压以及转速超限引发故障,文章在控制器中设置如下的约束:
 (21)
(21)
与传统模型预测控制相比,文章的AMPC控制器基于各风电机组的健康因数计算参考功率,并持续调整约束和对预测模型进行修正,指导控制变量在机组当前状态下不超限并以最优路径达到控制目标,使风电机组的输出功率以及扭矩更加稳定、平滑。健康因数随时间计算,但如果每个采样时刻都更新AMPC中的健康因数,这将会给系统带来很大的计算负担。因此,文中AMPC利用的健康因数每10个采样时段更新一次。同时,持续更新的动态约束降低了输出功率与扭矩的振荡幅度,因此AMPC具有减小非健康机组载荷,保证风电系统稳定性的作用。
4 仿真验证

图3 两区域系统结构示意图
为验证文章所设计的一次调频控制策略可行性与有效性,在MATLAB/Simulink仿真平台上搭建了一个含风电并网的算例系统,如图3所示。该系统是一个经典的两区域系统,其中区域一包含装机容量为44MW的DFIG风电场以及1台容量为90MW的同步发电机组(G1),区域二包含2台容量为90MW的同步发电机组(G2和G3),两区域通过两条110千米的高压线路连接,系统负荷水平为160MW。系统具体参数取值如表1所示。
表1 系统具体参数
参数 | 数值 |
系统额定频率/Hz | 50 |
DFIG机组直流母线电压/V | 1 150 |
DFIG机组惯性时间常数/s | 5.04 |
DFIG机组减载率 | 10% |
同步机组惯性时间常数/s | 6.5 |
同步机组调速器调差系数 | 0.04 |
调频回路惯性系数 | 10.08 |
调频回路下垂系数 | 50 |
该风电场包含5台健康机组(WT1-WT5)以及3台齿轮箱出现磨损的非健康机组(WT6-WT8)。系统拟在50s时突增16MW的负荷,彼时系统出现功率供需不平衡,导致系统频率跌落。文章从系统SCADA数据集中选取齿轮箱轴承温度信号以及振动信号数据作为基础,并基于熵权法计算出风电机组的健康因数,图4为文中8台风电机组的健康因数变化曲线。

图4 8台风电机组的健康因数
在一次调频领域,惯性-下垂控制是应用最广泛的控制方法,该方法综合考虑系统频率偏差以及变化率计算出系统所需调频功率。风电机组的功率备用控制通过控制DFIG转子转速高于最大功率点转速实现。本节分别从风电机组控制性能以及系统调频效果两方面与传统一次调频策略进行比较。
4.1 额定风速下的仿真结果
仿真系统的额定风速为11m/s,在此风速条件下将AMPC算法与传统PID算法进行比较,验证了算法的有效性。图5和图6分别为额定风速下应用两种控制算法后风电机组5的输出功率与电磁转矩的仿真结果。

图5 机组5在两种控制方法下的输出功率

图6 机组5在两种控制方法下的电磁转矩
从图5和图6中可以看出,在t=50s系统负荷突增时,风电机组的输出功率以及电磁转矩存在超调,而应用AMPC算法能够降低该超调量,并使机组控制器的控制效果更加稳定。因此,AMPC控制器具有优化控制器性能,减小风电机组不良载荷的效果。
仿真系统中,各风电机组在功率备用控制下均预留出了10%的功率裕度,调频功率则由惯性-下垂控制回路计算得到。传统的调频策略基于平均分配的方式为各风电机组计算参考功率,并采用PID算法跟踪参考功率,风电机组的输出功率以及电磁转矩如图7所示。

图7 八台风机在传统策略下的功率与扭矩输出
文章设计策略基于图4所示的健康因数为各风电机组分配参考功率,同时采用AMPC算法跟踪参考功率,8台风电机组的输出功率以及电磁转矩如图8与图9所示。从图中可以看到,与传统策略相比,文章设计策略使风电机组的功率及转矩输出更加平滑,并降低了非健康机组的转矩。
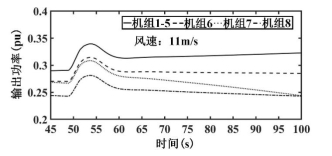
图8 各风电机组在文章设计策略下的输出功率
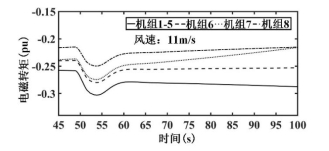
图9 各风电机组在文章设计策略下的电磁转矩
为了进一步验证文章设计策略在风电系统中的调频效果,将该策略下系统的频率响应与风电机组不参与系统调频以及采用传统策略时的频率响应进行比较,如图10所示。可以看到,在风电机组不参与一次调频的情况下,系统的频率最低点以及新稳态点明显低于采用两种调频策略的情况,因此证明了风电机组参与系统一次调频具有增强电力系统稳定性的重要作用。此外,文章设计策略的调频效果与传统策略基本相同,因此验证了文章设计策略的可行性。

图10 11m/s风速下三种调频策略的系统频率响应
4.2 不同风速下的仿真结果
为进一步验证文章设计策略在不同风速下的有效性,另外在风速10m/s和12m/s时进行仿真,仿真结果如表2所示。从表2可以看出,风速的变化会影响系统的频率响应。在风电机组不参与一次调频的情况下,上述不同风速间系统频率最低点最大相差0.004 4Hz,新稳态点最大相差0.004 3Hz。另外,从表中可以看出,在两种调频策略下,系统频率的最低点和新稳态点均随风速的增大而增大,原因在于风速越高,风电机组所能捕获的风能就越多,可供调频的功率也就越多。
表2 不同风速下三种策略的频率响应
V/ m/s | 控制策略 | fN/Hz | fS/Hz | ΔfN/Hz | ΔfS/Hz |
10 | 无主动调频 | 49.555 3 | 49.868 4 | / | / |
传统策略 | 49.613 5 | 49.874 | 0.067 8 | 0.006 6 | |
设计策略 | 49.613 4 | 49.873 9 | 0.068 3 | 0.007 1 | |
11 | 无主动调频 | 49.557 7 | 49.870 7 | / | / |
传统策略 | 49.615 6 | 49.876 3 | 0.067 8 | 0.006 7 | |
设计策略 | 49.615 6 | 49.876 2 | 0.068 8 | 0.007 9 | |
12 | 无主动调频 | 49.559 7 | 49.872 7 | / | / |
传统策略 | 49.617 5 | 49.878 3 | 0.067 8 | 0.006 7 | |
设计策略 | 49.617 4 | 49.878 1 | 0.068 9 | 0.007 9 |
表中,V为风速;fN为频率最低点;fS为频率新稳态点;ΔfN为最低点偏差量;ΔfS为稳态点偏差量。
表2的仿真结果表明,文章设计策略的调频效果与传统策略相近,因此验证了文章设计策略在不同风速下的有效性。
5 结束语
文章设计了一种计及各风电机组健康因数的风电系统一次调频策略。该策略指导各风电机组调频回路的调频系数基于健康因数动态调整,使各机组的输出功率自适应地调整。从控制模型方面分析,与传统调频策略相比,文中策略能够保证风电机组的调频性能,同时基于健康因数保证相关参量在机组不同状态下不超限,缓解非健康机组的状态恶化。最后,通过不同风速工况下的一个两区域风电系统进行了仿真验证。仿真结果表明,在频率扰动发生后,文中策略能够以调频系数变化的方式动态调整各风电机组的调频功率,在维持一次调频效果的同时,使风电机组的运行更平稳,降低了非健康机组的扭矩。该策略将风电机组健康状态与调频系数两个因素相结合,使机组的调频出力能够更加接近实际效果,有利于延长风电机组的服役寿命。
参 考 文 献
[1] Li Ning, Liu Yongqian, Li Li, et al. Numerical simulation of wind turbine wake based on extended k-epsilon turbulence model coupling with actuator disc considering nacelle and tower[J]. IET Renewable Power Generation, 2020, 14(18): 3834-3842.
[2] 秦毅, 刘国海. 基于惯量响应支撑功率的电力系统一次调频功率估算[J]. 电测与仪表, 2022, 59(04): 79-83.
[3] 曾繁宏, 张俊勃. 电力系统惯性的时空特性及分析方法[J]. 中国电机工程学报, 2020, 40(01): 50-58, 373.
[4] Qian Peng, Ma Xiandong, Zhang Dahai, Wang Junheng. Data-driven condition monitoring approaches to improving power output of wind turbines[J]. IEEE Transactions on Industrial Electronics, 2019, 66(08): 6012-6020.
[5] 李璐璐, 韩学山, 朱星旭, 李克强. 双馈风电机群并网系统时变最优潮流的优化追踪方法[J]. 电力自动化设备, 2021, 41(02): 56-62, 96.
[6] Jan Van de Vyver, Jeroen D. M. De Kooning, Bart Meersman, et al. Droop control as an alternative inertial response strategy for the synthetic inertia on wind turbines[J]. IEEE Transactions on Power Systems, 2016, 31(02): 1129-1138.
[7] Li Yujun, Xu Zhao, Jacob Østergaard, David J Hill. Coordinated control strategies for offshore wind farm integration via VSC-HVDC for system frequency support[J]. IEEE Transactions on Energy Conversion, 2017, 32(03): 843-856.
[8] Mustafa Kayikci, Jovica V Milanovic. Dynamic contribution of DFIG-based wind plants to system frequency disturbances[J]. IEEE Transactions on Power Systems, 2009, 24(02): 859-867.
[9] Vahid Gholamrezaie, Mehdi Ghazavi Dozein, Hassan Monsef, Wu Bin. An optimal frequency control method through a dynamic load frequency control (LFC) model incorporating wind farm[J]. IEEE Systems Journal, 2018, 12(01): 392-401.
[10]Zhao Jingjing, Lyu Xue, Fu Yang, et al. Coordinated microgrid frequency regulation based on DFIG variable coefficient using virtual inertia and primary frequency control[J]. IEEE Transactions on Energy Conversion, 2016, 31(03): 833-845.
[11]Tan Yingjie, Lasantha Meegahapola, Kashem M Muttaqi. A suboptimal power-point-tracking-based primary frequency response strategy for DFIGs in hybrid remote area power supply systems[J]. IEEE Transactions on Energy Conversion, 2016, 31(01): 93-105.
[12]Zhang Xiangyu, Wang Yi, Fu Yuan, Xu Lie. A novel method for obtaining virtual inertial response of DFIG-based wind turbines[J]. Wind Energy, 2016, 19(02): 313-328.
[13]付红军, 陈惠粉, 赵华, 等. 高渗透率下风电的调频技术研究综述[J]. 中国电力, 2021, 54(01): 104-115.
[14]徐波, 彭耀辉, 章林炜, 等. 基于优化减载与动态惯量控制的DFIG参与系统一次调频研究[J]. 可再生能源, 2021, 39(09): 1217-1223.
[15]曾雪洋, 张纯, 王顺亮, 等. 基于减载系数变化的风电机组一次调频控制[J]. 电力自动化设备, 2022, 42(08): 119-125, 139.
[16]James Boyle, Timothy Littler, S M Muyeen, Aoife M. Foley. An alternative frequency-droop scheme for wind turbines that provide primary frequency regulation via rotor speed control[J]. International Journal of Electrical Power & Energy Systems, 2021, 133(01), 107219-107231.
[17]Yang Peihong, Dong Xiaoling, Li Ya, et al. Research on primary frequency regulation control strategy of wind-thermal power coordination[J]. IEEE Access, 2019, 7: 144766-144776.
[18]杨华强, 王立琼, 安向昕, 等. 基于主客观赋权的设备多属性健康度建模[J]. 机械设计与研究, 2021, 37(04): 154-158.
[19]叶林, 路朋, 赵永宁, 等. 含风电电力系统有功功率模型预测控制方法综述[J]. 中国电机工程学报, 2021, 41(18): 6181-6198.
[20]张坤平, 郝琳. 基于模型预测的微电网频率协调控制策略[J]. 系统仿真学报, 2021, 33(03): 581-590.
[21]夏超, 王德林, 文小康, 等. 限功率下双馈风机基于模型预测控制的一次调频策略研究[J]. 电工技术, 2020(17): 34-39, 43.
作者简介:
王晶晶(1983—),男,本科,从事电气设计。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



