西安科技大学/理工雷科电子(西安)有限公司
摘要:在物联网技术日趋成熟的今天,利用地理位置信息进行资源配置最佳化室内定位系统的研究起到了很大的作用。位置信息是必要的辅助工具,在屋内取得地点资料的方案中,在IEEE802.11WiFi标准中,无线网络中的信道状况资料被定义为一个参数,是目前无线网络研究的一个热点。但是,现有的以信道状况资料为基础的定位系统,会造成多个错误的积累。目前还很难满足物联网和智慧家庭对精准度的要求。在室内进行高精度定位,还有很多问题亟待解决。因此,迫切需要研究能够有效解决上述问题的新方法、新技术,从而进一步提升室内高精度定位的精度与可靠性。
关键词:MUSIC算法;WIFI;室内定位
一、引言
由于电脑科技与现代网路的发展以及装置的广为传播,信息技术已与人们的生活紧密相连。地理位置信息及其服务给人类的日常生活提供了极大的方便,也给人类带来了全新的人生感受。GPS、蜂窝网络、北斗等国家自主开发的定位系统,是解决空间定位与定位问题的关键技术。它们在导航,车辆跟踪,智能手机等方面有着广泛的应用,它给人们带来了准确的方位和航行,改变了人们旅行的方式,也改变了人们获得信息的途径。
二、WiFi室内定位技术概述
现有的WiFi定位技术可分为以下三种:提出了一种利用距离进行定位的方法,一种利用角度测量进行目标定位的新方法,并提出了一种利用距离测量信号所构建的指纹库来实现对目标的定位的方法。
(一)基于测量距离的定位
利用距离进行定位的通常需要3个或更多的AP才能完成,从图1可以看出,当AP点有三个坐标时,以三个AP与被测装置间的信号传输特性的实验研究,人们可以通过分析信息来实现对访问点(AP)和待测点之间的距离进行定位。
 图1基于距离定位示意图
图1基于距离定位示意图
在需要测试的环境中,如图1(a)所示,三条径线将在一点上重合,从而实现准确定位。但是在现实世界中,我们不可能完全准确地估算出距离,而且每一次的测量结果都不一样,这就导致了图1B所示的情况,三个圆圈不可能在一点上重合,所以只能确定一个定位区N。然后,利用加权最小二乘等方法对目标进行实际定位。:
![]() =
=![]() +
+![]()
其中n取值为1至3,![]() 为待测点到
为待测点到![]() 的距离,
的距离,![]() 为
为![]() 的坐标,
的坐标,![]() 为待测点坐标。
为待测点坐标。
假设![]() <
<![]() <
<![]() ,
,![]() 为坐标原点。可以得到以下表达式:
为坐标原点。可以得到以下表达式:
方程可以进一步简化为式:
![]() =b
=b
其中H=![]() ;x=
;x=![]() ;b=
;b=
则方程的最小方差解为:
x=![]()
1.基于信号飞行时间的测距模型
信号飞行时间是一个以时间为基础的标量,因为无线电波是以光速在太空中传输的,因此,通过传输的时间和传输的速度,就可以估算出距离。假设一个被测点到一个AP的信号经过的时间是t,无线电讯号以V的速度,穿过空间。利用测距公式,估计测距为S=V×t。然后,利用前面所述的三侧定位原则,对被测点进行了位置估计。但因为电磁波以光速穿过太空,所以,TOF光谱仪的测量精度是非常高的,通常情况下,都是用专门的仪器,经过特殊的加工,才能将TOF光谱仪的测量精度提升到纳秒级别。
2.基于信号飞行时间差的测距模型
在此基础上,提出了一种新的TOF方法,该方法通过两个信号的差分进行运算,不需要得到绝对时间,从而减少了对装置时钟同步性需求。在图2中可以看到,被测量点是在两个双曲线的交叉点上。这种方法不需要精确的时间测量,只要各AP之间的时间保持一致就可以。
图2基于TDOA的定位示意图
室内定位系统就是使用时差来进行定位的一种方法。尽管这种方式的距离更精确,但是,要求在被测点设置一个无线传输设备。
3.基于信号强度的测距模型
以AP和被测节点之间的信号强度为基础,从距离损失模型中,就能推算出它的传输距离了。按照信号功率的依从关系式:
![]() (d)=
(d)=![]()
其中,![]() (d)为距离发射端距离为d时的功率,
(d)为距离发射端距离为d时的功率,![]() 是发射功率,
是发射功率,![]() ,
,![]() 分别为发射端和接收端的天线增益,
分别为发射端和接收端的天线增益,![]() 为电磁波波长。
为电磁波波长。
本文从自由空间窄带信号的传输损失对数模型出发,可以在LDPL的基础上在信号能量和相距之间建立一个映射关系:
![]() (dB)=
(dB)=![]() (dB)+10
(dB)+10![]() +
+![]()
其中,![]() 是距离1m处的能量损耗;
是距离1m处的能量损耗;![]() 是距离d处的能量损耗,
是距离d处的能量损耗,![]() 为路径损耗系数,
为路径损耗系数,![]() 为环境影响系数,通常被看作是零均值的高斯噪声,其方差与环境有关。
为环境影响系数,通常被看作是零均值的高斯噪声,其方差与环境有关。
4.基于信道状态响应的测距模型
通讯系统可经由客户服务提供商(信道状态信息)实时获取频道状态的数据报告,以及对RF信号的预处理。采用波束赋形法对发射信号进行调制,增加了通讯速度,增加了系统的稳定性。信道信息可以用时间域激波响应(CIR)来描述:
![]() =
=![]() )
)
其中![]() 、
、![]() 和
和![]() 分别为第i条传播路径的衰减后幅度、相位与传播时延。
分别为第i条传播路径的衰减后幅度、相位与传播时延。
一个无线信道的频率响应是衡量信号在不同频率上的衰减情况的表示形式。它反应了通道对各频率成分的作用程度。可以通过下列表达式来表达频域的频率响应:
![]() =
=![]()
其中![]() 是第k个子载波的中心频率,
是第k个子载波的中心频率,![]() 是第k个子载波幅度值,
是第k个子载波幅度值,![]() 是第i条传播路径的时延。
是第i条传播路径的时延。
(二)基于测量角度的定位
以测角为基础,建立了一种简单的三角形几何关系。只有知道被测点与两个接入点(AP)的夹角(即抵达角)和两个接入点(AP)的相对位置,才能实现被测点的高精度定位。由于该方法原理简单,所以在定位系统中得到了广泛的应用。

图3基于角度的定位示意图
这种方法的原理相对简单,启动费用相对较低,但在准确度上,却要比测距、诸如指纹匹配之类的定位算法具有更大的优越性。AOA是一种高精度的测角技术,一般需要一套专门的天线阵作为支撑。在一个天线阵中,由不同的天线元件所接收到的信号之间的相位差异,这样就能比较准确地估算出角度。具体的原理可参照图4。

图4基于到达角的测量原理
假定一个由两根天线组成的天线阵:天线1与天线2,其间距是d。若发送端到天线1的距离是L,则那么,达到天线1与天线2之间的信号通道之差DL可由下列公式表达:
![]()
由于天线2接受的电磁信号多传播了![]() 的距离,因此在两个接收天线阵元处会造成相位差
的距离,因此在两个接收天线阵元处会造成相位差![]() ,
,![]() 可以表示为式:
可以表示为式:
![]() =2
=2![]()
所以,联合前二项公式,就可以很容易的推算出入射角:
![]()
(三)基于信号指纹的定位
在强多径条件下,因多径成分及各部位噪声的不同,其能量强度也各不相同,可以用“指纹特征”来比拟。该方法针对每个位置点,从其位置点中抽取出唯一的位置点,并将该位置点的位置与另外位置点相联系。当一个人在房间里的定位和指纹信息都被建立起来后,只要对被检测点进行指纹特征信息的测量,通过对数据库的数字匹配,获得关键的值(位置),从而达到定位的目的。从图5中可以看出,该系统大致可分为两步:离线构造手印资料库与联机匹配。
 图5基于指纹定位的原理图
图5基于指纹定位的原理图
⚫1.离线建库阶段
在离线建立数据库的过程中,需要人工介入,以平均的时间间隔来布置室内环境中的指纹定位点,以及从各AP获取CSI/RSSI信息,通过对采集到的数据进行错误处理,进一步提高特征值的准确度,最终将特征值输入到手印数据库中,实现了手印数据库的建立。建立脱机指纹库需要大量的工作,而且不能实现自动化,这也是这种方式的一个限制。
2.在线定位阶段
定位信息是由在被测点由移动终端测得的CSI(指纹图)信息,在同样的错误处理之后,发送到指纹库中进行匹配而获得的。在位置匹配方面,由于深度学习、神经网络等技术的发展,国内外学者提出了许多新的解决方案,并取得了较好的效果。
三、室内定位算法设计
(一)MUSIC算法应用场景
常规多信号识别(MUSIC)方法在波达角测量上具有显著的优点,特别是能够实现多个信号的同步测向。MUSIC方法在高相关、高相关、低信噪比、近邻、低信噪比的情况下,其对多个信号的分辨率都有一定的局限性。尤其在两个信号源相干度很高的情况下,由于信号的自相关矩阵会变成奇异矩阵,使得MUSIC算法彻底失效。而MUSIC算法的性能又受多方面因素的影响,尤其是较小的信噪比和较多的天线数量。由于该系统仅采用了三个天线,因此采用了传统的MUSIC算法,其在实际应用中的效果并不理想。所以,本项目拟对以上所提问题进行最优求解。
 图6不同阵元数和信噪比下经典MUSIC算法性能
图6不同阵元数和信噪比下经典MUSIC算法性能
(二)空间平滑算法
其中,光滑化是一种以阵列口径为代价,来实现对协方差矩阵阶数的恢复。在多路径个数少于子阵个数的情况下,对其进行空间光滑化后,将成为一个无奇异矩阵。N个阵元被等分为L子阵列,各子阵列包括M个阵元,且满足M=N-L+1,如图7中所示。
 图7前后向空间平滑原理
图7前后向空间平滑原理
可以表示为式:
![]() =E
=E![]()
后向空间平滑协方差矩阵可以表示为式:
![]() =
=![]()
前后向空间平滑信号协方差矩阵可以表示为式:
R=![]() (
(![]() )=
)=![]()
(三)SmoothES-MUSIC估计算法
而对于现实场景中可以认为噪声为加性高斯白噪声,故有![]() =
=![]() 。由于I是一个单位矩阵,假定其阶数为M-N阶,则噪声的方差可以表示为:
。由于I是一个单位矩阵,假定其阶数为M-N阶,则噪声的方差可以表示为:
![]() =
=![]()
定义信号子空间矩阵![]() 为:
为:
![]() =AS
=AS![]() =
=![]() =
=![]()
基于信号与噪声子空间的正交性式可知:
![]() =
=![]()
对第k个信号的导向向量进行计算可得:
![]()
=![]()
=![]()
=![]()
=![]() =
=![]()
其中![]() 为求解广义逆运算,
为求解广义逆运算,![]() 为第k个信号的功率,
为第k个信号的功率,![]() =[0,
=[0,![]() 1,0,
1,0,![]() ,0]表示M维向量,
,0]表示M维向量,![]() =[0,
=[0,![]() 1,0,
1,0,![]() ,0]=0。
,0]=0。
基于上式可重新定义空间谱函数:
![]() (
(![]() )=
)=![]()
用搜寻法,就可以对空间谱函数进行求解,得到相应的达达角度。并且通过式可以对路径功率进行估计。
结果表明,MUSIC方法在高信噪比条件下,能获得较高的频谱函数峰谷分辨率。在低信噪比情况下,本方法仍能保持较高的检测精度,并能很好地控制错误,证明了本方法的鲁棒性。如图8。
 图8相干信源下空间平滑MUSIC与ES-MUSIC算法性能
图8相干信源下空间平滑MUSIC与ES-MUSIC算法性能
(四)SmoothES-MUSIC算法性能分析
对MUSIC,SmoothES-MUSIC和传统的MUSIC进行了模拟比较,对不同算法的性能进行了分析。在模拟过程中,设置了五种不同的路径,在相关信号的估计中,前两个通道被认为是相关的。阵元的间隔是0.03米,阵列天线的数目是3个,副载波的数目是30个,载波的频率是40MHz,中心是5.8千兆赫。
表1:仿真预设参数
设定的五条路径TOF与AOA值 | |
路径1:(AOA,TOF) 路径2:(AOA,TOF) 路径3:(AOA,TOF) 路径4:(AOA,TOF) 路径5:(AOA,TOF) | (-60[deg],10[ns]) (-25[deg],5[ns]) (10[deg],50[ns]) (30[deg],20[ns]) (60[deg],70[ns]) |
假设在一个场景中有n个路径,每一条通道都有自己的延迟和损失。那么,接收端接收到的结果是:
s(t)=![]() -
-![]() ]+
]+![]() -
-![]() ]+
]+![]() -
-![]() ]
]
=![]()
其中![]() 为第i条路径信号到达接收端的振幅,
为第i条路径信号到达接收端的振幅,![]() 为第i条路径传播时延。
为第i条路径传播时延。
在不同信噪比下对算法进行仿真分析得到图9、图10的结果。
 图9信噪比10db相干信源下三种优化MUSIC算法性能性能
图9信噪比10db相干信源下三种优化MUSIC算法性能性能
 图10信噪比-5db相干信源下三种优化MUSIC算法性能
图10信噪比-5db相干信源下三种优化MUSIC算法性能
与传统算法相比,Spotfi的最优算法虽然侧重于对载波的平滑,同时也考虑到了天线阵列的平滑,但对于强相关的信号,其分辨能力并不是很好,测量误差不可忽略,影响很大。在误差上,信噪比高时空域光滑MUSIC和SmoothES-MUSIC具有较高的精度,但Spotfi法受到相干信号分辨率的限制,存在较大的误差。空间平滑MUSIC与SmoothES-MUSIC算法AOA估计均方误差如图11。
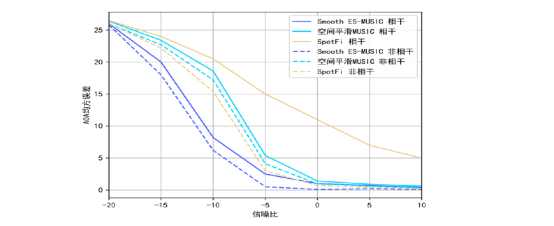 图11仿真中AOA估计均方误差
图11仿真中AOA估计均方误差
五、结论
无线网络中OFDM和MIMO技术的应用,承载着频域特征的CSI在波束成形方面显示出了优异的性能。所以,这篇文章尝试使用这样一个准确的资料来源,以此来达到对室内的高准确度位置,从资料加工和最佳化算法两方面提高了系统的鲁棒性和精确性。
参考文献
[1] 哈吉德玛.基于位置服务(LBS)的应用研究[J].现代信息科技,2019,3(04):61-62.
[2] 洪娜娜,吴燕芳,林珍.基于北斗系统与LBS技术相结合的智能交通助手[J].信息记录材料,2019,20(01):94-96.
[3] 麦志坚.LBS+O2O商业模式在移动电商平台中的应用与创新[J].商业经济研究,2019(06):85-87.
[4] 高伟,侯聪毅,许万旸,陈玄.室内导航定位技术研究进展与展望[J].导航定位学报,2019,7(01):10-17.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



