(陕西陕煤黄陵矿业有限公司一号煤矿,陕西 延安 727307)
作者简介:刘智(1987—),男,汉族,陕西黄龙人,本科学历,陕西陕煤黄陵矿业有限公司一号煤矿调度室干事,主要从事矿井生产调度及煤质管理工作
摘要:当今,随着我国经济的加快发展,采煤工作面是煤炭开采主要场所,采煤工作面内煤炭开采、运输设备多、空间狭小以及视觉环境差等特点。同时采煤工作面也是井下安全事故发生的主要场所,因此强化采煤工作面安全管理重视程度、实行在线实时监控对提高煤炭生产安全保障能力具有显著促进意义。传统采煤工作面安全监控主要通过人工巡检、布置传感器在线监控等措施,人工巡检有劳动强度大、效率低等问题;布置传感器在线监控则存在监控范围受限问题,仅能实现某个区域实时监测。近些年来,随着智能化技术以及监控技术不断发展,各类自动化巡检机器人在工矿企业中应用不断增加,在一定程度提升企业生产安全保障以及自动监控能力。目前煤矿使用的巡检设备有地面行走式、悬挂式以及轨道式等,但受采面设备多、空间小等因素制约,自动巡检设备在采煤工作面应用不广泛。文中就依据采煤工作面现场特点,提出一种巡检机器人系统,该系统可适应空间狭小、液压支架频繁前移的特点,可实现采面工作面环境实时监测,在一定程度提升采煤工作面安全保障能力。
关键词:煤矿井下;巡检机器人;机电转换;充电方法
0引言
在煤矿、冶金、电力以及石化等行业需要随时对大量的生产设备、变电站以及输油管线等进行监控和检测。传统的监测方法是采用现场人工巡检,但人工巡检不仅劳动强度大、效率低,而且易受人为因素的影响,巡检质量不能得到很好的保障。随着机器人技术的发展及其应用领域的不断扩大,巡检机器人开始出现在电力、矿山、石化以及城市建设等领域。由于煤矿环境复杂、危险岗位多且事故时有发生,为保证煤矿生产的安全,采取“无人则安”的工作原则;因此巡检机器人在煤矿井下的应用尤为重要。
1井下机电转换安全充电方法
煤矿井下巡检机器人机电转换充电方法功能,如图1所示,主要由巡检机器人、充电站、无源RFID卡片等组成。充电站包括可编程逻辑控制器(PLC)、变频器、隔爆型电动机、减速器和限位开关等。巡检机器人搭载隔爆型发电机、增速器、电池充放电管理板、传感器及读卡器等。对接齿轮采用鼓型齿轮结构,巡检机器人端为鼓型内齿轮,充电站端为鼓型外齿轮。齿轮采用铍青铜QBe2材料加工而成,具有高强度、高硬度、碰撞时无火花等特点,可保证充电对接装置长时间可靠工作,在摩擦或撞击时不产生火花,适合煤矿井下爆炸危险环境中使用。由于对接齿轮分属两个设备,对接后两个齿轮可能存在轻微偏心现象,因此对接机构转速不易过高,采用先减速再增速的方法,使对接结构工作在低转速下,延长使用寿命。充电站电动机通过对接齿轮带动巡检机器人的发电机进行旋转,发电机输出三相交流电压,充电管理板完成电池组的充电管理。RFID卡布置于巡检轨道下方距离充电站0m、1m、2m等处,巡检机器人顶端具有本安型读卡器,便于巡检机器人巡检时进行位置校正及充电对接过程中的距离判断。轨道端头安装有限位块及限位开关,以防巡检机器人读卡失败后继续前进与充电站发生碰撞,巡检机器人前端触碰限位开关时可紧急停止电动机,以免故障扩大。
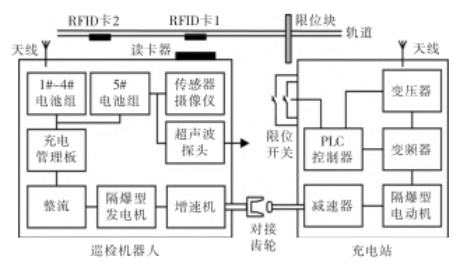
图 1 巡检机器人机电转换充电图
2煤矿井下巡检机器人机电转换充电方法
2.1传感器的选用及安装
机器人在行走过程中,需要利用环境感知传感器检测障碍物,安全绕过障碍物后到达目的地,因此,环境传感器的选择与安装机器人非常重要。本系统选用红外传感器与超声波传感器联合测距的方式来提高障碍物的检测精度。超声波传感器选用HC-SR04型,包括超声波发生器、接收器与控制器3个部分,可以利用产生的超声波信号向障碍物发射,接收返回信号的时间差来计算两者间的距离。超声波传感器的探测角度较小,约为15°,需在机器人的左前方与右前方各安装一台超声波传感器,以提高测量角度范围,保证机器人前方的探测障碍物的准确性。超声波传感器在机器人近距离处会出现一定盲区,无法对其中的障碍物进行测距,需要红外传感器来组合测量。红外传感器模块包括红外发射端、接收端、可调电阻器等,工作原理类似于超声传感器,可以利用返回信号的时间差计算障碍物距离。红外传感器测量的角度范围较广,测量的距离只有2~70cm,通过调节电阻器可控制测量距离。红外传感器应安装于机器人正前方,用于测量盲区内障碍物。
2.2自动巡检
巡检机器人通过在采面布置的钢丝绳上实现往返移动,对采面各位置进行巡检。其中驱动装置牵引钢丝绳移动;迂回装置架实现钢丝绳闭环;悬轨支撑机构将钢丝绳固定到液压支架上;避免钢丝绳在重力作用下出现较大下沉量;抱索机构则将巡检机器人固定到钢丝绳上;巡检机器人到达采面端头处到位检测元件会发出信号。具体采面自动巡检过程为:到位检测元件布置在采面上下端头位置,当机器人运行到到位检测元件位置后,到位检测元件会发出信号,此时驱动装置反转从而实现机器人往返自动循环。
2.3安全预警
通过巡检机器人内置的热成像系统实现沿线各位置温度监测,在巡检机器人运行接近采煤机等位置时,热成像系统可直接获取巡检沿线各电气设备温度,探测精度可达到0.2℃;配合人员巡检以及自动巡检,实现高温点预警。内置传感器发现瓦斯、温度等出现异常时,均会将异常参数传输给集控中心,通过集控中心显示异常点位置以及异常信息,实现采面工作面安全预警。
3巡检机器人行走机构设计
现有带式输送机巡检机器人行走方式的优缺点分析如下:
1)悬线牵引式:沿带式输送机正上方架空铺设钢丝绳,机器人本体通过固定抱索器固定于钢丝绳上,驱动系统采用防爆电动机,牵引机器人本体往复运动。优点:钢丝绳架设成本较轨道式低,爬坡能力强;缺点:机器人本体易摆动,运行稳定性差。
2)循环轨道链条传动式:沿输送带运输巷道环型吊挂布置开口向下的C型轨道槽,槽内安装链条,由防爆电机带动链条循环转动,机器人本体吊挂在链条上,随链条移动。优点:爬坡能力强;缺点:环型轨道及链条成本高,机器人本体易摆动,运行稳定性差,长距离驱动链条自重会增加驱动阻力。
3)双轨自驱轮式:沿带式输送机上、下输送带之间安装平行双轨,通过横杆把轨道固定于带式输送机机架上,巡检机器人自带驱动电机在轮轨上行走。优点:运行平稳;缺点:带式输送机上、下输送带之间空间狭窄,安装不便;转弯能力差;受轨道积水、煤泥影响,易打滑,爬坡能力差;轨道成本较单轨高。
4)单轨自驱齿轮齿条式:沿带式输送机安装单轨,轨道上安装固定齿条,巡检机器人采用齿轮与齿条啮合行走。优点:承载力大、传动精度高,不受积水影响、爬坡能力强;缺点:齿条安装精度要求高,不适合有弯道的应用场景。
5)单轨自驱轮式:沿带式输送机吊挂安装工字钢轨道,机器人本体的驱动电机带动驱动轮旋转,驱动轮安装在轨道两侧,在张紧机构的压紧下,靠驱动轮与轨道之间产生的摩擦力带动机器人本体行走。优点:运行稳定;缺点:随着驱动轮的磨损,张紧机构压力下降,会出现打滑现象,需要定期检测驱动轮张紧压力,轨道积水易导致打滑。
综合现有带式输送机巡检机器人行走方式的优缺点,巡检机器人设计为单轨自驱轮式,滚轮加链轮链条混合驱动方式,采用H型钢作为行走轨道,具有结构简单、不受巷道形变及路面地形影响、驱动控制简单可靠、运行姿态平稳等优点,特别适用于巡检路线固定、巡检距离长、空间狭窄、路面起伏多变的煤矿井下输送带运输巷道。
结语
1)采煤设备多、空间小,同时回采设备须频繁移动,给巡检机器人系统布置带来一定制约。依据现场情况,文中提出一种巡检机器人系统,该系统通过钢丝绳牵引实现巡检机器人往返移动、采用悬轨支撑机构确保液压支架前移和钢丝绳仍处于一条直线,提高巡检通过性;在巡检机器人内置各类型传感器可实现采面瓦斯浓度、温度以及沿线画面监测。2)地面集控中心可对巡检机器人获取参数、监控画面等信息进行融合处理,对巡检获取到的异常数据进行报警,以便井下作业人员及时前去处理,提升采煤工作面安全监控保障能力。在3302综采工作面现场应用后,该巡检机器人系统运行平稳、支架移架时机器人本体仍可平稳通过,同时巡检获取参数可实时传输,现场应用效果较为显著。
参考文献
[1]李一文.矿用巡检机器人风力充电方法研究[J].自动化与仪器仪表,2022(8):231-233+239.
[2]张小虎.矿用带式输送机巡检机器人研究与设计[J].矿业装备,2022(5):219-221.
[3]李忠奎.煤矿轨道巡检机器人设计研究[J].煤炭技术,2022,41(9):170-173.
[4]张海峰.煤矿挂轨式巡检机器人爬坡助力装置[J].自动化与仪表,2022,37(10):48-51.
[5]张树生,马静雅,岑强,等.煤矿综采工作面巡检机器人系统研究[J].煤炭科学技术,2019,47(10):136-140.
[6]方崇全.煤矿带式输送机巡检机器人关键技术研究[J].煤炭科学技术,2022,50(5):263-270.
[7]张爱民.矿用本安轨道巡检机器人设计与应用[J].智能矿山,2022,3(3):67-70.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



