呼伦贝尔农垦集团谢尔塔拉农牧场有限公司 内蒙古自治区呼伦贝尔市 021011
摘要:
在广阔的平原地点,使用大型喷灌机灌溉作业是最经济实用的方案目前国内大块地块基本都已使用喷灌机进行喷灌作业,但在使用中普遍存在在效率低、高能耗等特点,为了解决这些问题,我们需要进一步加强喷灌机的自动化水平,给喷灌机行走定位是一个非常关键的功能。本文详细介绍一下喷灌机行走定位的有哪些作用和给喷灌机行走定位的实现方法。
大型喷灌机分为指针式喷灌机和平移式喷灌机,适用于人口稀少的大面积平原地块,单台喷灌机灌溉面积最大可达1000亩,具有节约水资源,节省人力物力等优点。
为了进一步提高喷灌机的使用效率,需要给喷灌机加装自动化控制系统。比如增加以下功能:远程控制、数据监测、数据分析等。如实现以上功能需要一个必不可少的组件——喷灌机实时定位系统。通过给大型喷灌机行走精确定位,可以实现以下功能:
 1,远程查看喷灌机所处的位置;在物联网的发展下,远程控制设备已经是提高生产力必不可少的方式,远程控制喷灌机启动、停止、调速,查看出水压力和出水量、查看喷灌机实时位置等。
1,远程查看喷灌机所处的位置;在物联网的发展下,远程控制设备已经是提高生产力必不可少的方式,远程控制喷灌机启动、停止、调速,查看出水压力和出水量、查看喷灌机实时位置等。
2,根据行走位置可以控制喷灌机末端喷枪;末端喷枪装在喷灌机最末端,通过喷枪喷水可以额外灌溉一些土地,尤其是正方形地块时,指针机跨体无法覆盖的区域,由喷枪来灌溉。如下图所示,指针机需要位置传感器来确定是否行走到地块的边角,然后打开或关闭喷枪。

3,可以控制喷灌机行走到指定位置停止;当有些地块不需要指针机走满圆时,需要通过位置传感器来为喷灌机实施定位控制。
4,能够对灌机进行自动化控制,比如可以检测喷灌机是否在正常行走,如果正在运行的喷灌机位置长期不变,可能会有故障发生。还可以根据喷灌机实时位置进行调速,即可变流速灌溉(VRI)。
5,防止出现两台喷灌机撞车的危险:在有的地块,为了能喷灌更多的土地,有时相邻两台喷灌机覆盖的区域会重叠,两台喷灌机的末尾轮胎和悬臂处于同一轨迹,这时就需要检测两台喷灌机精确的位置信号,通过位置信号调整两台喷灌机的运行方向和速度,避免出现撞车危险。

如何实现喷灌机定位,有以下三种方法:
1,在指针机中心点安装传动装置,指针机中心支轴旋转带动编码器,编码器输出脉冲信号给plc,plc程序经过换算得出指针机位置角度。
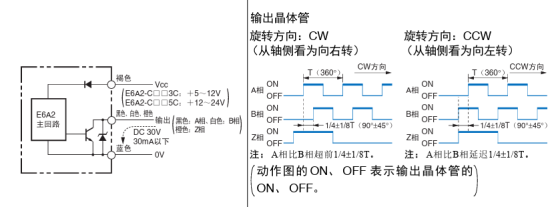
图中A、B为编码器输出的脉冲信号,接入到PLC的脉冲输入信号点,以西门子smart200 plc为例,接入到I0.0、I0.1两个点。A、B脉冲信号代表编码器每旋转一圈发出多少个脉冲,一般选用一圈1024个脉冲即可,脉冲数越多精度越高同时价格也越高。
下图中指针机中心旋转轴带动齿轮盘转动,齿轮盘同轴直连编码器,指针机和编码器为1:1传动,指针机旋转一圈,编码器输出1024个脉冲,西门子smart200系列plc可以检测4倍速率脉冲,即4096数值,如果指针机长度为300米,根据公式计算为:
指针机行走区域周长=指针机长度*2*pi
每个脉冲对应末跨距离=周长/4096=0.46米
为了方便用户理解,我们还需要将脉冲数转换成角度。最高可精确到0.01°。
以下为西门子smart200plc程序示例(STL语言):由plc读出编码器脉冲数,经过换算转换成角度,再根据角度设定喷枪的开启和关闭。
LD Always_On
DTR 脉冲数, 脉冲数浮点
MOVR 脉冲数浮点, 角度
/R 360.0, 角度
MOVR 指针机长度, #TEMP1
*R 2.0, #TEMP1
MOVR #TEMP1, 指针机圆周长
*R 3.14, 指针机圆周长
MOVR 指针机圆周长, 每个脉冲对应的距离
/R 脉冲数浮点, 每个脉冲对应的距离
LDR>= 角度, 第一段喷枪开启角度
AR<= 角度, 第一段喷枪关闭角度
= 喷枪开启
LDR>= 角度, 第二端喷枪关闭角度
AR<= 角度, 第三段喷枪开启角度
= 喷枪开启一
LDR>= 角度, 第三段喷枪开启角度
AR<= 角度, 第三段喷枪关闭角度
= 喷枪开启二
LDR>= 角度, 第四段喷枪开启角度
AR<= 角度, 第四段喷枪关闭角度
= 喷枪开启三
LD 喷枪开启
O 喷枪开启一
O 喷枪开启二
O 喷枪开启三
AN 急停
A 喷枪输出允许
= 喷枪输出
实际使用中,由于末尾行走的滞后和传动误差等原因,300米长度的指针机定位误差一般在10米左右。

2,喷灌机末端安装GPS/北斗定位模块。模块输出坐标信息,输出给PLC,经过plc换算成角度信号。GPS通讯一般使用NMEA-0183协议,该协议格式如下:
NMEA通讯协议所规定的通讯语句都已是以ASCII码为基础的:“$”为语句起始标志;“,”为域分隔符;“ *”为校验和识别符,其后面的两位数为校验和,代表了“$”和“*”之间所有字符的按位异或值(不包括这两个字符);“/”为终止符,所有的语句必须以回车换行来结束,也就是ASCII 字符的“回车”(十六进制的0D)和“换行”(十六进制的0A),我们选取其中一个GGA格式:
$GPGGA、<1>、<2>、<3>、<4>、<5>、< 6>、<7>、<8>、<9>、M, <11>、<12>*hh
<0>$GPGG,语句ID,表明该语句为GlobalPositioning System Fix Data(GGA)GPS定位信息
<1>UTC时间,hh mm ss格式(定位它的卫星提供)
<2>纬度dd mm mmmm 格式(前导位数不足则补0)
<3>纬度方向 (北纬)或S(南纬)
<4>经度ddd mm mmmm 格式(前导位数不足则补0)
<5>经度方向E(东经)或W(西经)
<6>GPS状态指示:0—未定位, 1—无差分定位信息, 2—带差分定位信息 ,3-无效GPS,6-正在估算
<7>正在使用的卫星数量(00- 12)(前导位数不足则补0)
<8>HDOP水平精度因子(0.5- 99.9)
<9>海平面高度(-9999.9- 99999.9)
<10>地球椭球面相对大地水准面的高度
<11>差分GPS信息,即差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)
<12>差分站ID号0000 - 1023(前导位数不足则补0,如果不是差分定位将为空)
2、GSA
$GPGSA、<1>、<2>、<3>、<3>、<3>、<3>、< 3>、<3>、<3>、<3>、<3>、<3>、<3>、< 3>、<4>、<5>、<6>、*hh
<0>$GPGSA,语句ID,表明该语句为GPSDOP and Active Satellites(GSA)当前卫星信息
<1>定位模式M—手动,A—自动
<2>当前状态 1—无定位信息,2—2D 3—3D
<3>PRN号01~32(伪随机噪声码),当前信道(共12个信道)正在使用的卫星PRN码编号(00)(前导位数不足则补0)
<4>PDOP综合位置精度因子(0.5- 99.9)
<5>HDOP水平精度因子(0.5- 99.9)
<6>VDOP垂直精度因子(0.5- 99.9)
3、GSV
$GPGSV、<1>、<2>、<3>、<4>、<5>、<6>、< 7><4>、<5>、<6>、<7>*hh
<0>$GPGSV,语句ID,表明该语句为GPSSatellites in View(GSV)可见卫星信息
<1>GSV语句的总数目(1 -3)
<2>当前GSV语句数目(1 -3)
<3>显示卫星的总数目00~12(前导位数不足则补0)
<4>卫星的PRN号星号(01- 32)(前导位数不足则补0)
<5>卫星仰角(00- 90)度(前导位数不足则补0)
<6>卫星旋角(00- 359)度(前导位数不足则补0)
<7>信噪比(00-99)dbHz
*语句共两条,每条最多包括4颗星的处所。每个星有4个数据,即<4>—星号 <5>—仰角<6>—方位<7>—信噪比
4、RMC
$GPRMC、<1>、<2>、<3>、<4>、<5>、< 6>、<7>、<8>、<9>、<10>、<11>、*hh
<0>$GPRMC,语句ID,表明该语句为RecommendedMinimum Specific GPS/TRANSIT Data(RMC)推荐最小定位信息
<1>定位时UTC时间hhmmss.sss格式
<2>状态A=定位V=导航
<3>纬度ddmm.mmm 格式(前导位数不足则补0)
<4>纬度方向N(北纬)或S(南纬)
<5>经度dddmm.mmmm (前导位数不足则补0)
<6>经度方向E(东经)或W(西经)
<7>速率,节,Knots
<8>方位角(二维方向指向,相当于二维罗盘)
<9>当前UTC日期ddmmyy 格式
<10>磁偏角,(000- 180)度(前导位数不足则补0)
<11>磁偏角方向,E=东经 W=西经
5、VTG
$GPVTG、<1>、T、<2>、M、<3>、N、<4>K*hh
<0>$GPVTG,语句ID,表明该语句为TrackMade Good and Ground Speed(VTG)地面速度信息
<1>真实方向(000 - 359),(前导位数不足则补0)
T-正北参照系
<2>相对方向
M-磁北参照系
<3>步长
N-节,Knots
<4>速率
K-公里/时,km/h
6、GPGLL
例:$GPGLL,<1>,S,<3>,E,<5>,<6>*<7>
<0>:$GPGLL,语句ID,表明该语句为Geographic Position(GLL)地理定位信息
<1>:纬度ddmm.mmmm,度分格式(前导位数不足则补0)
<2>:纬度N(北纬)或S(南纬)
<3>:经度dddmm.mmmm,度分格式(前导位数不足则补0)
<4>:经度E(东经)或W(西经)
<5>:UTC时间,hhmmss.sss格式
<6>:状态,A=定位,V=未定位
<7>:校验值
<8>、<9>、<10>、<11>、*hh
<10>太阳方位
<11>太阳方向
我们使用经度、纬度、海平面高度,经过公式换算,就能得到指针机位置信息。
Plc从gps读出来的数据为字符串,先将字符串转换成实数,格式为度分秒(ddd°mm′mm″),但如果通过经纬度计算距离需要转成度:度=ddd+mm′/60+mm″/3600
市面上民用GPS/北斗模块定位精度一般在2-5米,对于喷灌机定位已经足够使用。
GPS模块不仅适用于指针机,也适用于平移式喷灌机或其他户外移动式喷灌机。由于平移机需要每隔一百米换一次水带,用GPS模块可以控制平移机行走到换水带的地点自动停止,减少人力的使用。
3,行程开关定位:
在指针机中心支轴或集电环上加装多个行程开关,按固定角度排列,利用行程开关触点来进行模糊定位,这种定位方法简单实用,可靠性高,一般只用来控制喷枪的开启关闭,PLC编程简单,甚至喷灌机控制柜不用PLC,只用继电器电路也可以控制喷枪。
如果让喷灌机末端定位精确停在某处,在末端加装两个行程开关即可,但需要复杂的机械装置,如下图所示。

图中橙色方框内便是末端限位装置,当喷灌机行走到需要定位的位置时,摆杆撞上预先地埋阻挡件,摆杆触动盒子里的行程开关,行程开关断开行走信号,喷灌机停止。
三种定位方式的优缺点比较:
编码器定位 | GPS定位 | 行程开关定位 | |
定位精度 | 跨体越长,精度越低,喷灌机最终以末尾定位为准 | 不受跨提长度影响,取决于GPS模块精度 | 不能实时定位,只能定位个别点,定位精度低 |
安装 | 需要机械传动,编码器需要做防水处理 | 直接安装在跨体末尾,模块一般IP67防护 | 只需要在中心点安装几个行程开关 |
成本 | 高 | 中 | 低 |
软件调试 | 简单 编码器脉冲转换成角度信号即可 | 复杂 GPS坐标转换需要一套复杂的公式换算 | 简单 靠机械调节行程位置来定位 |
适用对象 | 指针机 | 指针平移均适合 | 指针机 |
后期维护 | 需要定期维护机械传动机构 | 一般不需要维护 | 定期更换行程开关 |
我们可以根据实际情况来选择两种定位方式,综合人员、成本、调试、维护等多方面来考虑。由于市面上喷灌机种类繁多,主体结构不尽相同,本文只是提供思路原理,具体实施细节需要根据实际情况来完成。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号