(上海工程技术大学,上海,202403)
摘要:针对蔬果采摘成功率低,蘑菇市场需求的增长,高强度的采摘要求、渐缺劳动力现状等问题突显等问题,基于仿生学原理,本文设计了一款蘑菇采摘机器人,系统介绍了机器人的结构方案、步态规划和控制系统方案,并搭建了机器人实物,通过测试,验证了该机器人设计的合理性。
Wuhengcheng,guoyichen,libinhui,zhoujintao,zhangting
(Shanghai University of Engineering and Technology, Shanghai,202403)
0引言
蘑菇富有蛋白质,含人体必须的6种氨基酸,可抑制肿瘤的发生,降低血压等食用功效。在我国蘑菇的年消费量逐年增加,种植模式也由单一的家庭向工厂化、集约化菇棚种植模式转型。随着蘑菇市场需求的增长,高强度的采摘要求、渐缺劳动力现状等问题突显,因此,开发一款智能蘑菇采摘机器人具有重要的现实意义。
目前,智能采摘研究多集中于蔬果采摘,如Naoki等人利用相机图像面积变化测定蔬果,提高蔬果机器人抓取成功率[1]。Irie等人开发了自动化芦笋采摘收集机器人来代替手工劳作[2]。USN Rao利用机器视觉与图像处理和微控制器来识别和处理棉花图像,并用机械臂采摘棉花[3]。Christopher Lehnert 等人提出了一种利用机械手自动收割甜椒的方法[4]。张铁中等人对于农业采摘机器人在田间中对农作物的果实图像进识别提取,通过对水果的图像识别,提出蔬果采摘机器人工作模式[5]。吕继东等人对苹果采摘机器人的控制系统进行优化,提升了苹果采摘效率[6]。蔬果采摘主要是围绕如何根据图像信息调整机器手姿态动作、提高成功率和采用多个末端执行器等主要问题展开。相对而言,蘑菇采摘研究较少。姬江涛等人设计了一种双孢菇柔性仿形采摘末端[7],以解决现有夹持式采摘机械手对双孢菇造成的机械损伤高、采摘损失大等问题。程鼎豪则设计了一种双孢菇采摘机械手末端执行器[8],解决了双孢菇人工采摘效率低的问题。
综上所述,本项目拟在现有研究基础上,以蘑菇为主要对象,设计一款蘑菇智能采摘机器人,为蘑菇采摘提供切实有效可行的解决方案。
1结构设计方案与实现
采摘结构由相互对称的移动副和滚动高副、滑轨以及爪子等结构构成。可实现多方位的移动型采摘以采摘到目标蘑菇。图像算出出符合采摘的蘑菇坐标位置后,实时将坐标位置信息通讯给多轴运动机构软件系统,X、Y轴高度运动带动抓取机构运动,到蘑菇位置上方后,Z轴结合高度信息运动到蘑菇上方合适位置,抓手进行旋转抓取。[9]加精确地进行蘑菇采摘行为的同时减少采摘对蘑菇造成的损伤,根据蘑菇采摘生物学特性和蘑菇种植房环境的设定,定制采摘结构的设计需求和参数,根据实际情况中蘑菇种植场景及环境,结合种植的菇房和菇床,设计龙门式的笛卡尔坐标机器人的导轨系统,由此安装在导轨滑块上的采摘机械手臂能够在十字滑台构成的平面任意滑动,从而实现在所覆盖的蘑菇菇床采摘面积内可移动且能根据需求自行升降、能够满足蘑菇床狭窄高度空间采摘作业的采摘系统。因传统的金属刚性手爪无法有效保护蘑菇的黏液膜层,且蘑菇的种植环境湿度较高,容易对金属手爪和电机造成锈蚀。[10]因此自主开发基于仿人采摘动作的机器人柔性采摘手爪,对娇嫩易损的柔性体蘑菇进行无损和高效采摘。通过实验获得蘑菇最小抓力、破坏抓取力以及蘑菇被完全包裹时机械臂最短和最长长度等设计参数,结合采摘方式、环境以及所使用的材料设计末端柔性采摘手爪的结构。

图1 采摘装置示意图
传送结构由传送带构成,可以将采摘装置所采摘到的蘑菇运送到已经准备好的收集装置内。传送装置以前轮作为主动轮,由电控控制电机分配功率大小带动整个平面,同时因为考虑到蘑菇柔软的性质以及蘑菇培养环境下湿润潮湿的情况,为了达到不破坏蘑菇并且延长传送带的使用寿命,使用具有弹性,耐磨、耐潮等优点的橡胶作为传送带。由于采摘过程中机器人需要不断再导轨上变换自己的位置,因此将传送结构连接到两侧轨道上,利用传送结构和机器人电机的转动数据作为输入数据,通过研究电机转速及算法解决传送装置与机器人同步运动的问题。由于传送装置在采摘装置下方,存在占用采摘空间问题,因此在设计过程中应利用通信来增强传送装置与采摘装置之间的同步率。

图2 运动装置示意图
收集结构由空心薄壁容器构成。可将传送装置传送来的蘑菇收集在容器内,由内部设置的称重装置进行重量计算,当重量达到一定值后挡板抬起双胞菇落下。通过研究蘑菇在成熟情况下最大及最小直径,计算出蘑菇的体积区间来设计收集装置的体积及容积,预留出足够的内部空间安装称重装置,并根据实际使用情况设计挡板的运动轨迹。
双胞菇采摘机器人的实物搭建将采用3D打印技术实现。通过研制样机进行实验,验证各部分系统功能。对样机进行运动速率及稳定性测试、龙门式笛卡尔坐标机器人导轨系统的移动准确度测试、柔性采摘手爪抓取实验、蘑菇视觉识别与测量实验、传送带转动速率及与整机同步率测试、收集系统称重准确度及挡板灵活度测试、整机采摘实验,分别获得运动系统和导轨系统以及传送带的电机转速偏差、采摘损伤度、蘑菇识别正确率、测量精度偏差值、收集系统中称重和挡板同步率、采摘耗时等一系列指标来对蘑菇采摘机器人进行评测,以验证设计方案的可靠性和正确性。
智能蘑菇采摘机器人整体结构由五个部分组成,见图3所示,其分别为四轮轨道行走机构、直角坐标运动机构、集成视觉识别功能柔性抓取机构、收装一体蘑菇储存机构、带输出机构。四轮轨道行走机构,可实现在蘑菇采摘机器人在蘑菇棚种植层间水平移动,增加蘑菇采摘面积。直角坐标运动机构,由连接板连接在四轮导轨行走机构上方,实现采摘机械柔性抓手机构在XY平面上移动。集成视觉识别功能柔性抓取机构,固定于直角坐标运动机构上,其加持半径可调以满足不同大小蘑菇的抓取,配合视觉识别技术,完成不同大小蘑菇分类采摘。收装一体蘑菇储存箱,由挂钩固定于四轮导轨行走机构外侧,采摘完成的蘑菇通过传送带进入储存箱,当蘑菇收集达到一定重量后,储存箱一端自动打开将箱内蘑菇装入打包袋中。

图3分采秤装一体化智能蘑菇采摘机器人总体结构示意图
直角坐标运动机构和集成视觉识别功能柔性抓取机构结构如图4所示,包括有电动推杆、转动轴、连接器、放置架、柔性机械抓手固定板、柔性机械抓手、步进电机和相机,同步轮一、同步轮二,步进电机固定于放置架,与同步轮一相连,同步轮二与同步轮一通过皮带相连,同步轮二安装在放置架上方,通过传动轴与连接器连接,通过步进电机的转动带动同步轮一的转动,从而带动同步轮二的转动,同步轮二通过传动轴与连接器将转动传到柔性机械抓手固定板,柔性机械抓手固定板下侧固定有电动推杆,电动推杆的数量为四个,呈十字形分布,每个电动推杆末端均与机械抓手相连,柔性机械抓手的数量为四个。通过电动推杆的伸缩来实现柔性机械抓手的左右移动,通过柔性机械抓手固定板的转动来实现柔性机械抓手的转动。从而实现扭转采摘蘑菇。
为实现更加精确地蘑菇采摘行为并减少对蘑菇的损伤,需要根据蘑菇采摘生物学特性和蘑菇种植房环境的设定,设计具有一定灵活性的采摘结构,同时结合直角坐标机器人的导轨系统来实现采摘机械手臂的移动和固定。
在采摘结构的设计中,需考虑到蘑菇的规格大小、生长方向和密度等特性,以便进行合理的采摘安排。此外,应根据蘑菇种植房的环境条件,包括温度、湿度、光照等因素,选择适合的材料和制作工艺,并合理布置采摘结构。例如,在设计中可以采用具有防水耐用特性的材料,并保证采摘结构与菇床之间的距离适当,以避免对蘑菇造成过度损伤。
针对蘑菇种植房的空间狭小和高度限制等问题,采用直角坐标机器人的导轨系统,使得采摘机械手臂能够在平面内任意滑动;并且通过坐标机器人的升降功能和滑动轨迹,可以轻松实现对于不同高度菇床的采摘操作。同时,由于导轨系统的设计十分巧妙,还可以在一定程度上提高采摘效率。收装一体蘑菇储存机构和带输出机构结构方案如图4所示,包括有型材一、型材二、型材三、传动轴、同步轮一、同步轮二、电机座、步进电机,型材一内侧通过角件固定有型材二,型材一数量为两个,型材二的数量为九个,型材三通过角件与型材一连接,型材一安装在下底板内侧,型材三外侧对称安装有轴承座,轴承座的数量为四个,轴承座之间安装有传动轴,传动轴的数量为两个,传动轴外侧固定有同步轮一,电机座固定于上底板上侧,步进电机固定与电机座上侧,同步轮二固定于步进电机上,同步轮一与同步轮二通过皮带连接,当步进电机转动时,带动同步轮二转动,通过皮带同步轮二将转动传给同步轮一,从而带动传动轴的转动,从而实现连接传动轴的皮带转动。 通过皮带转动实现对采摘后蘑菇的运输。传送装置以前轮作为主动轮,由电控控制电机分配功率大小带动整个平面,同时由于蘑菇在自然状态下非常柔软,采摘的过程中需要特别小心谨慎,否则容易造成蘑菇的损坏。而在培养环境中,蘑菇所处的环境通常是潮湿而湿度较高的,这也增加了传送带的使用难度。
基于这些考虑因素,我们建议使用具有弹性、耐磨、耐潮等优点的橡胶材料作为传送带。橡胶材料可以通过其自身的柔软性和弹性来减少对蘑菇产生的压力和挤压,从而避免对蘑菇造成不必要的损伤。此外,橡胶材料还具有良好的耐磨性和耐潮性能,这使得传送带能够更长时间地保持良好的使用状态,并且减少维护和更换的频率。对于传送带的设计,也需根据具体的采摘方式和蘑菇生长的特点进行适当的调整。例如,在传送带的设计中应考虑到蘑菇的大小、密度、生长方向和采摘方式等,以便在运输过程中保证蘑菇能够始终保持稳定的位置和姿态。此外,还需注意到传送带的表面光滑度和滚动阻力等因素,以便确保传送带的运转更加平稳和可靠。

图4 采集机构设计与结构实现
储存箱结构如图5所示,储存箱结构包括有挂钩、斜板、挡板、围板等几个组成部分。其中,挂钩数量为两个,上端与上顶板相连,下端与围板相连,主要起到支架和支撑的作用。围板下端固定有斜板,用于引防止蘑菇从蘑菇收集机构中掉落。围板还安装有一个挡板,用于调节蘑菇的流量和防止堵塞。整个收集结构的设计考虑到了多种因素。首先,挂钩的数量和位置要合理,能够支撑整个结构并保证其稳定性;其次,斜板和挡板的设计要符合蘑菇采摘的特点,使蘑菇能够顺利地滑落到指定的位置;最后,围板的设计要考虑到蘑菇的体积和密度,以保证能够完整地收集到所有的蘑菇。
蘑菇通过蘑菇运输机构到达蘑菇储存箱机构,见图6,这是实现蘑菇自动化采摘的最后一步。在整个采摘过程中,蘑菇的流量和速度都得到了有效控制,使得收集效率更高、更加精准。

图5 储存箱结构方案
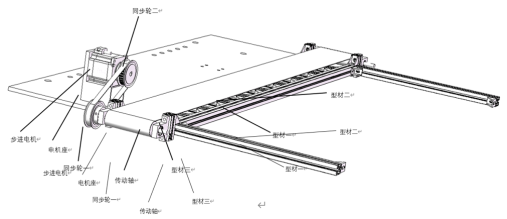
图6 蘑菇输送机构
2双胞菇采摘机器人控制系统设计
控制系统采用正点原子stm32单片机进行控制,控制算法利用语言编程设计,依据视觉识别与测量系统及机器传感器所反馈的数据为输入数据,对机器各部位的运动参数根据机器运动学解进行计算得到机器每个模块的运动参数以及关节参数,从而达到精确采摘的目的。
视觉模块将使用OpenMV用于目标识别,通过颜色识别来寻找蘑菇的位置以及蘑菇大小来决定是否采摘,蘑菇的图像识别主要是提取蘑菇的边界、周长、面积和中心坐标,蘑菇图像的中心区域其灰度值最大,达到220以上,因此选取较大的阈值 thr =220,对蘑菇图像进行阈值分割,得到各个蘑菇的中心区域。[11]
确认后将蘑菇的所在位置用二维坐标表示传送给电控模块以驱动机械臂采摘蘑菇,并在之后检测蘑菇是否被采摘成功以及是否需要重新驱动机械臂再次进行采摘。
3结论
本项目结合轨道移动和直角坐标运动,利用视觉识别和柔性抓取技术完成不同大小蘑菇分类采摘,利用传送带完成采好蘑菇的输送,利用便携式储存框完成蘑菇收集与装袋打包,最终实现蘑菇自动化智能化采摘全流程。
主要创新点:1)结合轨道移动和直角坐标运动,有效提高采摘作业空间,且结构简单可靠,作业效率高;2)采用柔性抓取和视觉识别技术,有效改善蘑菇抓取的成功率,且减少蘑姑损坏;3)集成便携高效的蘑菇输送、收集和装袋结构,实现蘑菇自动化智能化采摘全流程。
参考文献
[1] 农业机器人关键技术及应用研究进展[J]. 陈帝伊;陈建海;马孝义.农机化研究,2010(05)
[2] 工厂化栽培双孢蘑菇采收技术[J]. 汤倩倩;黄建春;桑亮亮;沈新芬;蔡斌强.食用菌,2020(05)[3] 智能采摘机器人的发展及应用[J]. 杨忠;张雪娇.数码世界,2019
[4] 郭亭亭:打造机器人“特种兵”[J]. 周文燕 ;丁莉莎.大学生,2022
[5] 双孢菇采摘机器人研发及关键技术研究[D]. 袁鹏.北京林业大学,2022
[6] Robotics and labour in agriculture. A context consideration[J]. Vasso Marinoudi;;Claus G. Sørensen;;Simon Pearson;;Dionysis Bochtis.Biosystems Engineering,2019
[7] MangoNet: A deep semantic segmentation architecture for a method to detect and count mangoes in an open orchard[J]. Ramesh Kestur;;Avadesh Meduri;;Omkar Narasipura.Engineering Applications of Artificial Intelligence,2019
[8] Image Segmentation for Fruit Detection and Yield Estimation in Apple Orchards[J]. Suchet Bargoti;;James P. Underwood.Journal of Field Robotics,2017
[9] Sensors and systems for fruit detection and localization: A review[J]. A. Gongal;;S. Amatya;;M. Karkee;;Q. Zhang;;K. Lewis.Computers and Electronics in Agriculture,2015
[10] THE DEVELOPMENT OF A MACHINE VISION SYSTEM FOR SHIITAKE GRADING[J]. HO‐HSIENCHEN;CHING‐HUATING.Journal of Food Quality,2004(5)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



