国家能源神东煤炭集团设计公司 陕西神木 719315
摘要:煤炭行业提出了机械化换人、自动化减人的科技强安要求,国有大中型煤炭集团开始聚焦煤矿井下机器人及人工智能等相关技术的研究。本文通过对煤矿井下巡检机器人的工作原理、瓦斯巡检、工况识别、导航定位、灾害感知等方面进行研究,并对机器人的自学习方法进行了展望。
关键词:煤矿井下;巡检机器人;自学习算法
1.引言
2019年,国家煤矿安监局制定公布了《煤矿机器人重点研发目录》,对掘进、采煤、运煤、安控和救援5类的38种煤矿机器人提出了具体的研发应用要求,鼓励支持煤矿企业开展煤矿机器人的研发合作,推进煤炭工业高质量发展。
煤炭生产是典型的高危、艰苦行业,使用机器人代替人参与煤炭生产是煤矿企业实现“少人化”甚至“无人化”生产的必然途径。煤矿井下的综采工作面具有作业空间狭小、机械设备多、工作噪音大、煤尘浓度高、视觉环境差等特点,是矿井安全事故的多发地点。
2.巡检机器人的功能研究
在采煤工作面安装巡检机器人即可实现对采煤工作面实时环境监测、设备状态监测、作业人员监测,可以提高综采工作面的标准化管理水平,确保煤炭安全生产和人身安全[1-2]。
2.1工作原理
煤矿综采工作面巡检机器人应具备自移、定位、影象信息采集、智能图像传感、预警、人机交互等多种环境监控检测功能,实现对井下煤壁、片帮、大块煤、有毒有害气体、温度、粉尘、装置以及运行环境状态的实时监控。巡检机器人在工作时需设置温度传感器、湿度传感器、风速传感器、超声波传感器、红外传感器、瓦斯浓度传感器等多种传感器,以实现如图1所示对井下不同数据的采集[3-4]。
由于工作面的环境比较恶劣,巡检路径复杂,为了避免巡检机器人在井下工作运算大量数据时会出现延迟现象,采用WIFI网络作为传输方式,通过在井下工作面布署多个如图2所示的WiFi节点进行网络覆盖,当巡检机器人接入到临近网络后将采集的图像和数据信息发送到监测中心服务器上。

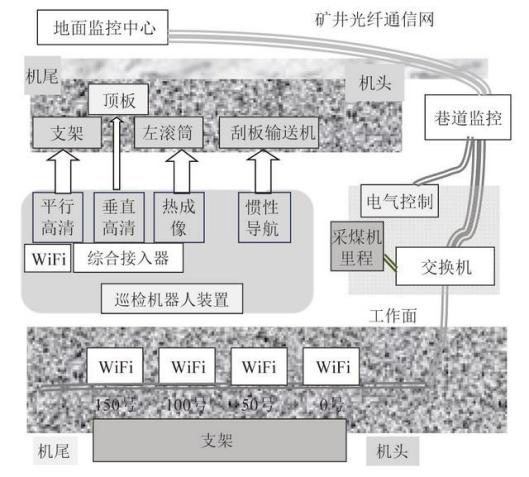
图1 巡检机器人数据采集原理框图 图2 巡检机器人系统工作示意图
当采煤机等设备出现故障或现场环境参数超标时,会迅速进行故障报警,提高了煤矿的应急故障处理效率[5]。在采煤工作面安装巡检机器人可实现对采煤工作面实时的环境监测、设备状态的监测、作业人员的监测和井下设备检查的功能,可强化综采工作面管理,确保煤炭安全生产和人身安全。
2.1瓦斯巡检
对高层巷道围岩断面通风温度状况变化变形进行自动观测而研制成的用于回风巷道对通风温度状况变化进行自动监控的通风监视巡检机器人,具备了高层围岩巷道断面通风温度转化变形的自动判识、积水温度检测、通风温度检测等参数自动采集、智能温度分析和巷道危险气体防范智能预警等多种应用功能,为高层巷道的通风维护与管理通风监控系统的智能调节设计提供了重要依据。
2.3工况识别
煤矿井下人员、煤流、带面异物、带面损伤等目标受煤矿井下环境因素影响,目标与背景相似度高,导致在视频图像中目标整体成像显著性低。基于目标轮廓先验知识,采用候选区域生成方法,结合深度神经网络模型,学习各部件之间的拓扑关系,在准确检测目标显著部件的基础上推理回归目标整体轮廓,进而实现非显著性的皮带机异常工况的视频识别。对于粉尘稀疏场景,采用普通的滤波器,对于粉尘稠密场景,可采用去雾算法。基于大气散射模型和图像成像先验知识,融合光照归一化方法,整合图像去粉尘、去雾和光照均衡化理论到统一算法框架中,协同提升视频图像的清晰度和对比度。
2.4惯导定位
机器人内部利用RFID芯片存储好设定位置信息,将该位置与惯性导航系统的解算位置的差值作为系统误差模型的观测量,利用卡尔曼滤波器对陀螺漂移和加速度计零偏进行估计,求解出修正载体的姿态误差、位置误差以及速度误差,校准捷联式惯性导航系统误差,使该组合导航系统能够长时间在井下工作[6]。
2.5灾害感知
在机器人四周配备传感器实现环境感知,测取障碍物在搜救面的深度、顺次扫描窗口内障碍物并进行编号规划机器人行走路径;使用惯性导航和视觉导航相结合的方法进行救灾,利用惯性导航的自主性,利用视觉导航对惯性导航的偏移进行修正,使用双目视觉技术实现工作环境的立体匹配和三维重建。
3.机器人的自学习能力
煤矿井下巡检机器人设备应具有一定的自主学习能力,能根据实际情况做出最有利的判断。而要使机械设备具备自主学习的能力,就要具有一个可以自我学习的“大脑”。对于机器人而言,“大脑”指的是微处理器和智能学习算法,而智能学习算法,如人工神经网络算法、深度学习算法,以及模糊算法、混沌算法等,是实现自主学习的关键。这些算法都有着其特有的使用环境,需要机器人研究开发人员长期的不懈努力才能实现。
4.结语
随着国内矿山智能化建设的不断推进,煤矿机器人迎来了全面发展的机遇,机器人将在煤矿井下更多的场所替代人工进行巡检工作。用巡检机器人代替在危险区域的工作岗位,可以大幅度减轻煤矿井下工人的劳动强度,提高煤矿工人的幸福指数,全面提升煤矿智能化的建设水平,实现煤炭企业的安全生产和经济效益最大化。
参考文献
[1]葛世荣. 煤矿机器人现状及发展方向[J]. 中国煤炭, 2019, 45(7):10.
[2]葛世荣, 胡而已, 裴文良. 煤矿机器人体系及关键技术[J]. 煤炭学报, 2020, 45(01):455-463.
[3]张辰, 范永, 李贻斌,等. 人工智能在煤矿机器人中的应用[J]. 中国煤炭, 2021, 47(1):6.
[4]潘涛, 邱爽, 赵永峰,等. 国家能源集团智能矿山建设实践与探索[J]. 中国煤炭, 2020, 46(5):11.
[5]邵珠娟, 邓晓刚, 程豪杰,等. 智能带式输送机巡检机器人在煤矿的应用[J]. 中国煤炭, 2020, v.46;No.527(06):40-44.
[6]胡青松、张赫男、李世银、孙彦景. 基于大数据与AI驱动的智能煤矿目标位置服务技术[J]. 煤炭科学技术, 2020.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



