连云港同创勘测有限公司 江苏省连云港市 222000
摘要:随着技术不断发展,无人机摄影测量取代传统测绘技术,实现动态监测土地资源愿景。但现有算法无法保证无人机摄影测量所得出的山地丘陵影像满足观测要求,需进一步优化。鉴于此,文章提出一种针对山地丘陵地区的无人机摄影测量路径规划优化算法,通过构建虚拟三维地形,布设飞行任务中的航点位置,删除覆盖程度较低的冗余影像数据,最终给出经优化的无人机飞行路径。经测试,文章所设计的优化算法在不同情境下均能够给出最优路径,证明能够用于山地丘陵地区,实现飞行路径规划目标。
关键词:山地丘陵;无人机摄影测量;路径规划算法
引言:研究山地丘陵地区的无人机摄影测量路径规划算法能够为土地资源规划和动态监测提供支持,提升土地整治工作效益。结合近几年计算机视觉技术与无人机摄影技术的整合和融合应用来看,通过将无人机应用于图像获取工作中,能够展示高质量3D图像,得到与实际情况相符的三维模型。但因飞行路径规划算法适用于平坦地形中,面对具有高低起伏的山地丘陵地形无法按照原有算法流程得到影像,所显示的影像中包含冗余数据,无法达到以最少数据量全覆盖测量区域的目标。为此,研究用于山地丘陵地区的无人机摄影测量路径规划优化算法十分必要。
1 用于山地丘陵地区的无人机摄影测量路径规划算法优化
1.1构建虚拟三维地形
本文设计如图1所示的虚拟三维地形模型,便于测定算法在不同地形情境下的具体表现[1]。
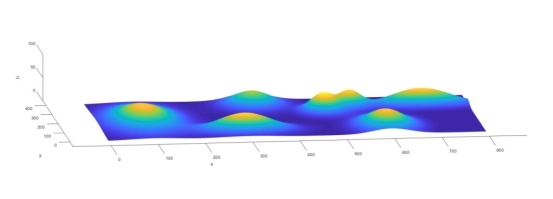
图1 虚拟三维地形
虚拟三维地形的大小为![]() ,利用指数函数描述山体的数字模型为:
,利用指数函数描述山体的数字模型为:

其中,![]() 为山峰总个数;
为山峰总个数;![]() 为第i个山峰沿x轴方向上的衰减量;
为第i个山峰沿x轴方向上的衰减量;![]() 为第i个山峰沿y轴方向上的衰减量;
为第i个山峰沿y轴方向上的衰减量;![]() 为地形参数;
为地形参数;![]() 、
、![]() 为第i个山峰的中心坐标;
为第i个山峰的中心坐标;![]() 为研究区域的点高程值[2]。
为研究区域的点高程值[2]。
1.2布设航点
完成三维地形设计后,进入到布设研究区域密集航点网络阶段。
研究区确定后,定义相机内部参数、旁向重叠度、航向和GSD等输入参数,用以表示飞行高度和夹角。将沿航向和旁向所成的夹角记为![]() 、
、![]() ,以此划定影像拍摄范围。结合夹角参数、飞行高度和重叠度,根据以下公式确定航线间隔和基线长度,以此确定研究范围内的密集航点网络。
,以此划定影像拍摄范围。结合夹角参数、飞行高度和重叠度,根据以下公式确定航线间隔和基线长度,以此确定研究范围内的密集航点网络。
![]()
![]()
其中,![]() 为基线长度;
为基线长度;![]() 为航带间隔;
为航带间隔;![]() 为沿航向方向上的影像与航点在竖直方向上所成的夹角;
为沿航向方向上的影像与航点在竖直方向上所成的夹角;![]() 为飞行高度;
为飞行高度;![]() 为航向重合度;
为航向重合度;![]() 为沿旁向方向上的影像与航点在竖直方向上所成的夹角;
为沿旁向方向上的影像与航点在竖直方向上所成的夹角;![]() 为旁向重合度[3]。
为旁向重合度[3]。
检测覆盖度是对虚拟地形中各点是否覆盖至少3张图像的测定,满足数字产品应用的检测标准。所创设的代码需首先建立元细胞数组,以此将影像集予以模拟。航点位置图像与元细胞数组的子数组一一对应,并且地形模型与子数组大小相同[4]。通过给定夹角数值,划定航点所拍摄影像的具体区间。处于区间内的点赋值为1,区间外的点赋值为0。求出元胞数组的子数组和,形成新数组,并对应地形模型的各个位置。在此集合中,各数值为观测位置点的次数。运用覆盖率检测办法,确定研究区域是否满足全覆盖需要。
1.3删除冗余数据
在所得到的影像中,如若将地形模型中的点删除,其所覆盖的区域仍旧包含3张以上影像,说明此点所形成的影像为冗余数据,应当删除[5]。本文所设计的冗余数据删除算法如下:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
使用以上算法筛选影像,得到244个航点,即收集到244张具备实际利用价值的影像。
1.4优化路径
飞行路径规划的最终目的是控制无人机在最短飞行时间和飞行距离下,以最低能耗快速高效达成数据采集测量目标。能耗是无人机在测量任务续航能力的反馈,低能耗拥有强大续航能力,高能耗将降低续航能力。在充分考虑无人机飞行特点后,将飞行时间确定为目标函数。
在原本无人机飞行中,以S型路线为主,以点1为起点,点244为终点。将原本的飞行时间与优化后的飞行时间进行比对,确定优化算法后是否能够以最短路线飞行[6]。
引入模拟退火算法,降低计算量。在修改模拟退火算法过程中,初始解设定为S型路线,以此保证飞行路径规划更具有现实性。用表示传统S型飞行路径,在扰动距离相近两个航点得到新解,并利用迭代法,经过多次迭代,输出全局最优解,符合不同温度的限定条件。
运行此优化算法,将无人机匀速直线运动作为理想条件下的运行姿态。当无人机从起点出发时,开始记录飞行时间,并将转弯时间设为5s,飞行速度设为5m/s。无人机飞过所有航点后,计算始末时间间隔[7]。判定无人机是否在进行转弯的标志是某一点与前后一点间能否形成三角形,若为三角形,则证明是转弯运动。本文所设计的无人机飞行时间计算代码如下:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
通过计算,无人机按照S型路径飞行时所需要的时间为1819.04s,运用优化算法完成同样飞行任务所耗费的时间为1753.29s。对比两种条件下的飞行时间,可以看出优化路径后的飞行时间缩短,节约5.99%的飞行时长。
2用于山地丘陵地区的无人机摄影测量路径规划算法优化测试
2.1飞行路径优化
为检测所设计的优化算法是否能够满足不同情境下的作业需要,应当经过测试,确定适应性。本文所设计的测试涵盖5种不同情境,分别为:情境1、2为算法优化所建立的三维地形,通过更改最小被观测次数的具体值,探究次数变化与输出结果间的关系;情境3、4、5为建立的
![]() 的地形研究区域。并且,情境3中的高程值为预先设定,借助样条插值法,求出研究范围的所有点高程[8]。情境1为概率高密度函数
的地形研究区域。并且,情境3中的高程值为预先设定,借助样条插值法,求出研究范围的所有点高程[8]。情境1为概率高密度函数![]() (其中,
(其中,![]() 为测量点高程;
为测量点高程;![]() 、
、![]() 为测量点的横纵坐标值)描述的地形,情境2为平坦地形。按照1.2中布设航点的方式,就5个情境分别布设(见表1),检测覆盖度。依据1.3中删除冗余数据的方式保留不同情境下的航点数量,进而获得优化后的飞行路径结果。
为测量点的横纵坐标值)描述的地形,情境2为平坦地形。按照1.2中布设航点的方式,就5个情境分别布设(见表1),检测覆盖度。依据1.3中删除冗余数据的方式保留不同情境下的航点数量,进而获得优化后的飞行路径结果。
输入参数及结果 | 情境1、2 | 情境3、4、5 |
航点个数 | 320 | 780 |
| 30° | 38.6764° |
| 45° | 46.7867° |
飞行高度 | 70m | 70m |
重叠度 | 80%/50% | 90%/70% |
表1 输入参数及密集航点网络布设结果
2.2测试结果分析
分别整理5种情境下的飞行时间和数据量,得到表2所示结果。
重叠度/% | n | 飞行时间 | 数据量 | |||||
航/旁 | 优化路径/s | 常规路径/s | 时间节约/s | 删除前 | 删除后 | 节约量/% | ||
情境1 | 80/50 | 4 | 1894.32 | 1894.33 | 0.01 | 319 | 305 | 4.39 |
情境2 | 80/50 | 3 | 1753.29 | 1819.04 | 5.99 | 320 | 225 | 23.50 |
情境3 | 90/70 | 3 | 2745.90 | 2890.02 | 9.23 | 780 | 186 | 76.24 |
情境4 | 90/70 | 3 | 2178.5 | 2263.5 | 3.76 | 780 | 167 | 78.70 |
情境5 | 90/70 | 3 | 2203.5 | 2265.9 | 2.82 | 780 | 156 | 80.0 |
表2 不同情境下飞行路径优化结果比较
通过读表可以发现,在不同情境下,优化后的算法均能够在删除冗余数据后得到最短的规划路径,证明此种算法适用于山地丘陵地区,且对于提高无人机摄影测量工作效能起到正向作用,有助于高效作业目标达成。对于航点较为密集的布设情境中,经优化的航点网络数据量降低幅度较大,最高可达到78.70%。
结论
参考文献
[1]刘凯,魏双羽,白跃伟.CMM示教过程中路径规划算法的改进与应用[J].机床与液压,2022,50(14):55-60.
[2]李艺达,隋少春,曾坤,杨建平,谢乾,汪俊.特征自适应的飞机大型蒙皮曲面测量系统与测量规划[J].南京航空航天大学学报,2022,54(03):428-438.
[3]王荣. 基于三维点云的工件曲面轮廓检测与机器人打磨轨迹规划[D].东华大学,2022.
[4]史鹏圣. 无人艇海洋测量区域全覆盖路径规划算法与岸基监管系统研究[D].海南大学,2022.
[5]姜阔丰,陈岳坪.首尾相连的自由曲面测量路径优化[J].智能制造,2022(02):72-76.
[6]代玉梅,张瑞玲,马黎.改进A~*算法的采摘机器人路径规划与跟踪控制[J].中国农机化学报,2022,43(03):138-145.
[7]李文龙,王刚,田亚明,寇猛,李中伟.在机测量技术与工程应用研究进展[J].航空制造技术,2022,65(05):14-35.
[8]刘明亮,阿达依·谢尔亚孜旦,王永旭.一种用于螺旋锥齿轮齿面测量路径优化的改进遗传算法研究[J].机械科学与技术,2022,41(03):445-450.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



