(青岛黄海学院 智能制造学院,山东 青岛,266427)
摘要:针对目前国内老人和下肢残疾人士上下楼梯困难的状况,对爬楼轮椅进行了研究,旨在设计一款能够单人操作的星轮式多功能爬楼轮椅。轮椅的爬楼功能主要依靠其独特的星轮式爬升机构,可以通过不断交替翻转星轮组来实现自动爬楼的功能。当轮椅在平坦的地面上行驶时,星形支架保持稳定,而星轮则围绕自身的中心轴旋转;当攀登楼梯时,星轮保持与自身中心轴的固定不动,而前后两轮组则同步旋转。采用两组星轮组,保证了轮椅攀爬楼梯过程中的安全性和稳定性。
关键词:星轮式;电动轮椅;爬升装置
0引言
《中国人口老龄化发展趋势预测研究报告》指出,中国正面临着一个不可逆转的老龄社会。2020年,中国65岁及以上的老年人口已经超过1.91亿,在全国总人口中所占的比重高达13.5%,预计到2050年,这一数字将进一步增长,达到4亿以上[1]。2022年,根据中国残联的最新统计,全国残疾人口已经达到8500万,这一庞大的群体,加上残疾人的特殊需求,让助残助老变得更加迫切。而轮椅也已经成为残障人士日常出行的必备交通工具,它的出现改变了他们的生活方式。随着技术的进步,传统的轮椅已经不再适用于日常生活,因此,开发出更加先进的智能爬楼轮椅显得极其必要。
1.1主要设计要求
首先,星轮式爬楼轮椅的设计非常重视其结构的优化,这样才能确保它的安全和高效的使用。为了满足这一目标,必须采用一种高效、稳定的星轮机构,并且配备一套优质的动力系统,以提供足够的爬升扭矩。
作为爬升装置的关键组件,星轮机构的设计应当从最初的尺寸出发,以确保它能够完美地适应楼梯的尺寸。过大或过小的星轮和星轮架都会影响爬升装置的性能,因此,在设计时应该特别注意这两个参数的选择。
应该根据乘坐者的身体宽度,将座位宽度在此基础上加5cm,以确保乘坐者的舒适度,同时也能够更好地操作轮椅。
在选择座位时,应该先确定臀部与小腿的水平距离,再将其精确地缩短6.5cm。
为了提升轮椅的使用体验,建议将其座位的高度调节至4cm,同时脚踏板应当与地面保持5cm的距离,以免占据太大的空间,也避免使乘客感受到不适。
扶手或臂托一般在座位上方距离座面22.5~25cm。
星轮式多功能爬楼轮椅结构示意图见图1。
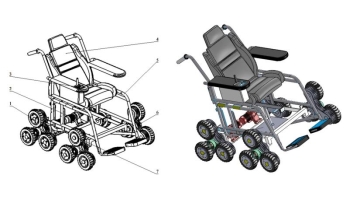
图1 星轮式多功能爬楼轮椅结构示意图
1-爬升机构;2-电机;3-控制手柄;4-座椅;5-轮椅主架;6-行走机构;7-轮毂电机
1.2 爬升机构设计
电动轮椅是一种先进的交通工具,它能够帮助人们轻松上下楼梯。这种设备由两个部分组成:一个是爬楼梯机构,另一个是平地行走机构。根据国内外的研究,爬楼梯机构有许多种类,如星轮式、履带式和腿足式。
行星轮具有独特的构造,它们可以自转,也可以围绕主轴中心旋转。爬楼时,会自动锁定,星轮架通过绕主轴旋转,实现爬楼的功能。轮胎的结构由三个星形机构组成,伺服电动机将其驱动,使轮轴在两侧旋转,从而使星形机构的中心部分的齿轮也随之运动,最终,三个星形机构的齿轮之间的传动也会被激活,从而使轮胎也随之运动[2]。当在平坦的地面上行驶时,中心齿轮就会带动两个星轮向前移动,三个星轮整体会朝前移动。但是,如果你要爬楼,中间的齿轮就会被锁定,中心齿轮的旋转会带动整个三星轮系统一起向前翻转。这种翻滚机构的结构是一种复杂的结构,由轮胎、主轴、三个行星齿轮以及内外挡圈组成[3]。当电机驱动减速器时,主轴齿轮就会被激活,而三个行星齿轮则保持静止,这样就可以让每个轮胎围绕着中心轴线不断地翻滚,最终完成爬楼的任务
2 创新点
2. 电动轮椅:轮椅配备可移动可充电的电池、动力驱动、智能的电子控制系统,使得轮椅具备更多的智能化功能,如与乘客的交互。
3. 结构设计:利用 Solidworks 软件进行三维建模,设计出更加便捷、贴近使用者实际需求的智能爬楼轮椅。
3结语
该论文介绍的是一款星轮式多功能爬楼轮椅的设计。这种轮椅是在普通电动轮椅的基础上进行的改进,增加了一个爬楼机构,使得轮椅除了原有的基本功能之外,还可以爬楼梯。这款星轮式多功能爬楼轮椅的设计,主要包括主架、平地行走机构、爬楼翻转机构及其相应的控制系统,它不仅可以实现高效的爬楼,而且还拥有出色的耐用性、安全性、舒适性等特点。
参考文献
[1]李佳阳.中国人口老龄化问题分析及应对措施研究[J].国际公关,2022,No.142(10):
[2]皮莹.多功能轮椅的主机构设计与研究[D].湖北工业大学,2020.
[3]刘鑫,宫逸文,赖文博,陶程,高义.三星轮多功能轮椅设计[J].起重运输机械,2022(08):30-34.
作者简介
周琳淏,2004年07月,青岛黄海学院智能制造学院机械设计制造及其自动化
本科在读

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



