中核四川环保工程有限责任公司(四川广元628031)
【作者简介】曾祥宝(1984.09-),男,汉族,四川省广元市人,大学本科双学士学历,中核四川环保工程有限责任公司高级工程师,主要研究方向:核设施退役及放射性废物处理。
摘要:为了解决核设施退役中远程拆除作业问题,本文开展了面向核设施退役的移动机器人系统的研制工作,研究了包括机械臂、移动底盘、快换工具在内的双臂移动机器人的机械本体设计以及双臂移动机器人协同控制策略、基于人机交互接口的 机器人遥操作运动控制策略等内容,为机器人技术在核工业领域的应用奠定了坚实基础并积累了丰富经验。
关键词:核退役; 移动机器人;协同控制策略;遥操作运动控制策略
Abstract: In order to solve the problem of remote dismantling operation in decommissioning of nuclear facilities, this paper develops a mobile robot system for decommissioning nuclear facilities. Through the research on the mechanical body design of the two-arm mobile robot including the manipulator, mobile chassis, quick change tool, the cooperative control strategy of the two-arm mobile robot and the remote-operation motion control strategy of the two-arm robot based on human-computer interaction interface, which has accumulated valuable experience and laid a solid foundation for the application of robot technology in the field of nuclear industry.
Key words: nuclear decommissioning; mobile robot;cooperative control strategy;remote-operation motion control strategy
核设施退役是一个复杂并且涉及多项技术要求的系统性工程,具体包括源项调查、去污、设施拆解、辐射防护和场址去污等[1,2]工作。其中最重要的一项工作就是拆除放射性的设备及管道等,但目前的拆除作业大多采用人工操作方式且自动化程度较低,无法避免高辐射对现场作业人员的伤害。为了实现核设施退役工作的远程控制操作,减少辐射作业人员的伤害,采用机器人取代人工,并对相关技术开展系统研究,取得了丰硕的研究成果[3-5]。本文开展了面向核设施退役任务的移动机器人系统的研制工作,设计开发包括机械臂、移动底盘、快换工具在内的双臂移动机器人的机械本体,并且对双臂移动机器人协同控制策略以及基于人机交互接口的机器人遥操作运动控制策略进行研究。
一、移动机器人硬件系统研制
为了使机器人具备移动灵活,环境适应性强,且可实现攀爬、越障及避障等功能,采用履带式移动平台搭载双工业臂作为移动机器人主体,机械臂末端安装快换工具,可根据作业需求快速更换作业工具。 移动机器人的整体结构如图1所示。
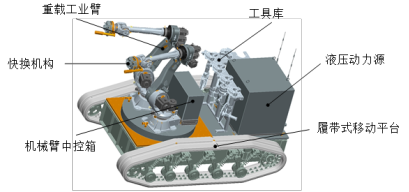
图1 移动机器人整体结构
1.机械臂设计
针对机械臂的运动灵活性要求,设计了六自由度的工业臂,机器人通过搭载两只所设计的机械臂便于协同作业并提高自身负载能力。机械臂前三轴负责位置调整,后三轴负责姿态调整。为了实现机器人的功能扩展,满足核退役拆除任务中不同的操作要求,核退役 机器人的机械臂末端装备快换机构,以实现末端操作工具的快换。
2.履带式移动平台设计
履带式移动平台主要由机架、履带模块、平台回转机构、工具库及操作工具、机械臂工控箱和液压动力源6部分组成。机架是整个履带式移动平台的主框架,履带模块、平台回转机构、工具库及操作工具和液压动力源都直接安装在机架上。履带模块包括履带、驱动轮、支重轮、拖动轮和导向轮组成。履带模块的驱动轮由伺服电机经谐波减速进行驱动,负责左右履带的行进,伺服电机和谐波减速位于机架内。平台回转机构同样由位于机架内伺服电机和谐波减速驱动。工具库及操作工具采用后置搭载的方式,用于平衡双机械臂的重量。操作工具包括管路剪切工具、盘锯切割工具、末端夹持工具、钻孔工具、等离子切割工具,可与机械臂末端的快换机构进行连接,从而实现机械臂末端的工具搭载。所有工具均采用液压或气压源驱动,液压源和气压源都封装在动力源箱内。
3.电气控制系统设计
电气控制系统采用地面站+上位机+下位机的三级控制系统架构,其中上位机与地面站之间的通信采用以太网通信技术,上位机同下位机的通信应用EtherCAT总线进行通信。地面站采用PC机,运行Windows操作系统,其主要功能是采集存储运行数据、在线调整控制参数,接收现场实时影像、实现人机交互以及对机器人运动状态的远程遥操作。上位机即运动控制器,主要完成机械臂关节状态规划、移动平台运动生成、本体状态感知、通信协调、系统自修复与容错等任务。下位机即驱动控制器,负责接收运动指令,实现电机运动伺服控制、协调通信、传感信息采集与处理的基本功能。机器人通信系统采用有线的通信和电力供给模式。
二、移动机器人控制系统设计
针对机械臂和移动平台独立控制的情况,采用预估计量补偿的方法进行协调控制。协调控制策略在工程应用时,在硬件上分为“机械臂控制”和“移动平台控制”两个分系统。机器人协调控制方案如图2所示。
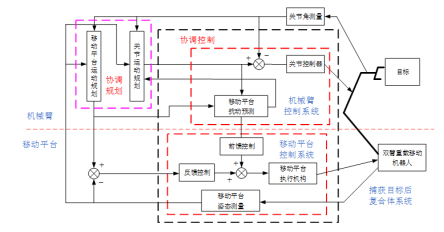
图2 移动机器人协调控制方案
控制系统的具体工作过程为:机械臂控制分系统负责机械臂部分的控制,同时估算该运动对移动平台产生的干扰,并将该干扰以力矩或者角动量的形式输入给移动平台姿态控制系统,由姿控系统抵消该干扰,以保持移动平台姿态稳定。在控制过程中,可通过姿态测量元件将姿态角、姿态角速度、姿控状态等信息反馈给机械臂控制系统,机械臂系统根据上述信息决定是否需要重新规划。通过这种硬件上分离、逻辑上协调的方式实现机械臂运动与移动平台姿态的协调控制。
三、移动机器人遥操作系统设计
遥操作系统由人机接口子系统、视觉反馈和标定子系统、远端环境子系统和虚拟现实子系统四部分组成。遥操作系统的核心是研制具有双边力反馈遥操作人机交互接口以及研究双边力反馈遥操作控制算法,构建人在回路(Human-in-Loop)的双臂遥操作控制系统。通过操作主端的两个协作机械臂来控制从端机器人的双臂运动,协作机械臂还能将从端机器人的双臂所受到的力反馈给操作人员,两边交换位姿以及力和力矩的数据(图3)。
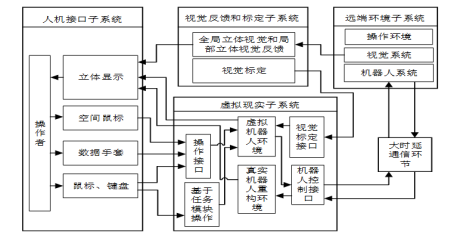
图3 遥操作系统组成
四、总结
本文开展了面向核设施退役任务的移动机器人系统的设计工作,设计了由两条6个自由度工业机械臂和具有较强越障能力履带式移动平台构成的移动机器人,并设计了该机器人的电气系统。并对移动机器人协同控制策略和基于人机交互接口的机器人遥操作运动控制策略进行了系统研究。本文设计的移动机器人系统可全面提升机器人在复杂非结构化环境下处理复杂多样的作业任务的效率和质量,可有效解决高辐射场环境中人员无法近距离的拆除作业问题,可有效降低作业人员在作业现场的辐射剂量,具有广阔的应用前景。
参考文献:
[1]王双宇,刘永阔,李梦堃,等.核设施退役去污拆除工艺检索系统设计与实现[J].应用科技,2015,42(03): 77-80.
[2]曹俊杰,陈戏三.我国核电厂退役现状及思考[J].科技视界,2016, 173(14):1-3.
[3]刘呈则,严智,邓景珊,等.核电站应急机器人研究现状与关键技术分析[J].核科学与工程,2013(01):97-105.
[4]王进.Brokk多功能拆除机器人及其应用[J].建筑机械,2006(11): 83-85.
[5]李海龙,张健.核电厂退役机器人的技术研究[J].科技视界,2019(24): 12-14.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



